1. 서론
1.1 연구의 배경 및 목적
1.2 연구의 범위 및 방법
2. 방법론
2.1 Random Sample Consensus (RANSAC)
2.2 Edge detection
2.3 교점
3. Validation
3.1 Data preparation
3.2 성능 평가
3.3 검증 결과
4. 결론
1. 서론
1.1 연구의 배경 및 목적
최근 많은 산업 분야에서 데이터 분석과 디지털화 기술의 필요성이 증가하고 있음에도 불구하고, 건설 산업은 이러한 디지털 트랜스포메이션의 중심에서 상대적으로 뒤처져 있다(Korea Research Institute for Construction Policy, 2020). 국제적인 측면에서 비교해 볼 때, 한국의 건설업계는 기술 성숙도 면에서 여전히 해외 선진 기술에 미치지 못하는 것으로 나타났다(Cisco Systems, 2020). 이러한 상황은 건설 산업의 효율성 및 혁신성 증진을 위한 기술적 접근의 필요성을 시사한다.
3D Light Detection and Ranging (이하 3D LiDAR) 기술은 컴퓨터 비전의 발전과 함께 건설산업에서 필수적인 도구로 자리 잡았다. 과거 LiDAR 기술은 데이터 후처리의 기술적 한계로 인해 널리 활용되지 못했지만, 최근 GPU와 같은 고성능 하드웨어의 발전으로 딥러닝(Deep learning) 기술이 대두되면서, 이를 통한 데이터 처리가 가능해졌다. 이는 LiDAR로부터 얻은 Point Cloud Data의 활용 가능성을 크게 확장하였다.
Point Cloud Data는 물체로부터 반사된 레이저의 되돌아오는 시간을 기반으로 각 포인트의 거리 정보를 계산하여 형성된다. Point Cloud Data는 정형화되지 않은 비정렬 데이터의 형태로, 기하학적 특성 파악이 어려운 데이터 형식을 갖추고 있다. 이로 인해 BIM 기반 역설계 기법을 위한 Scan-to-BIM과 같이 Point Cloud Data를 다루는 연구들에 있어서 대상 인프라 시설물을 모델링 할 때 필요한 시설물의 형상 정보를 현장에서 직접 측정하여 BIM 모델을 생성하는 경우가 다분하다.
또한, 현장 측정이 아닌 3D LiDAR를 활용하여 확보된 Point Cloud Data로부터 형상 정보를 도출하는 과정에서도 주변 식생과 같은 외부 노이즈의 영향을 받아 대상 시설물의 Point Cloud Data에 손실이 발생할 수 있으므로 대상 시설물의 길이와 위치 정보 도출 시에도 어려움이 존재한다.
본 논문에서는 Scan-to-BIM의 한계를 극복하기 위해 3D LiDAR 스캐너를 통해 확보된 Point Cloud Data를 활용하여 RANSAC 알고리즘과 PCEDNet 알고리즘의 조합을 통해 만들어진 모델을 바탕으로 Point Cloud Data에 손실이 존재하여도 대상 시설물의 단면 수치 정보를 자동으로 도출할 수 있는 기술을 제시한다.
1.2 연구의 범위 및 방법
본 연구는 인프라 구조물 중 하나인 옹벽에 대한 분석을 수행하였다. 본 연구의 기술에서의 성능 평가를 위하여 국토교통부에서 제정한 옹벽의 표준 설계도를 기준으로 Autodesk의 Revit 프로그램을 이용하여 성능 평가에 사용할 가상의 옹벽 모델을 구축하였다. 구축된 가상 옹벽 모델은 L형, 역 T형, 반중력식, 중력식의 네 가지 타입으로 생성하였으며, 옹벽 타입별로 서로 다른 두 가지 단면의 가상모델을 생성하여, 총 여덟 개의 모델에 대해 제안된 단면 수치 정보 및 길이 정보 자동 추출 기술의 성능 평가를 실시하였다. 또한, 성능 검증을 위하여 인천광역시에 위치한 실제 옹벽 구조물을 대상으로 3D LiDAR 스캐너로 포인트 클라우드 데이터를 취득하여, 실 측정 데이터에 대한 제안된 기술 성능을 검증하였다.
3D LiDAR 스캐닝에 사용된 장비는 'A'사의 고정밀 고정형 스캐너로서 측정 가능 범위는 0.6m에서 80m이며, 정밀도는 3''의 성능을 가진 스캐너이다. 하나의 옹벽 구조물 스캔을 위하여, 총 8개의 측정 지점에서 데이터를 스캔하였다. 8개의 측정 지점은 폐색되는 지점을 최소화하고 스캔 정확도를 높이되 후처리 과정에서 성능 저하 및 지연 현상이 발생하지 않게 하기 위해 데이터 양을 최소화하기 위해 선정되었다. 또한, 육안 판단을 통해 대상 구조물에 대해 폐색되는 부분을 최소화할 수 있는 스캔 지점을 선정하였다. 이를 통해 정제, 정합하여 검증과정에 활용하였다.
가상 옹벽 모델은 환경 노이즈(식생, 도로, 차량 등)가 제거된 상태로 제작되었으나, 실제 옹벽은 다양한 노이즈 요소가 존재하여, 이를 Cloudcompare 프로그램을 통해 데이터 전처리 과정을 거친 후 분석에 활용하였다. 이때, 노이즈 요소는 수동으로 정제할 수 있지만, 식생부분에 가려져 대상 옹벽에서 폐색되는 부분이 생길 수 있다. 폐색되는 부분에 대한 길이 도출은 본 연구의 방법론에서 설명하는 RANSAC 알고리즘을 활용하여 해결할 수 있다.
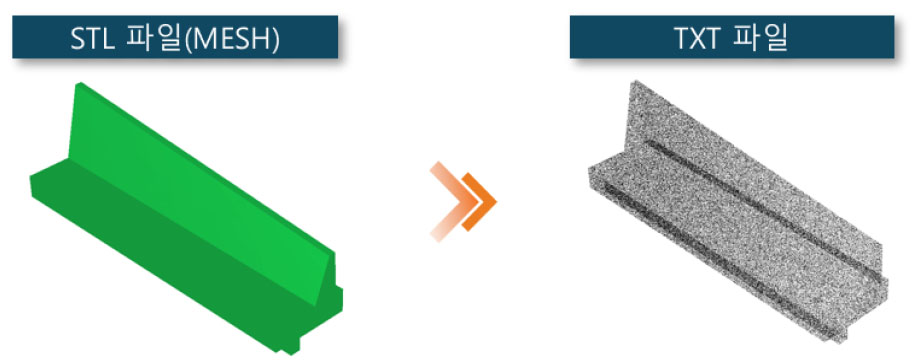
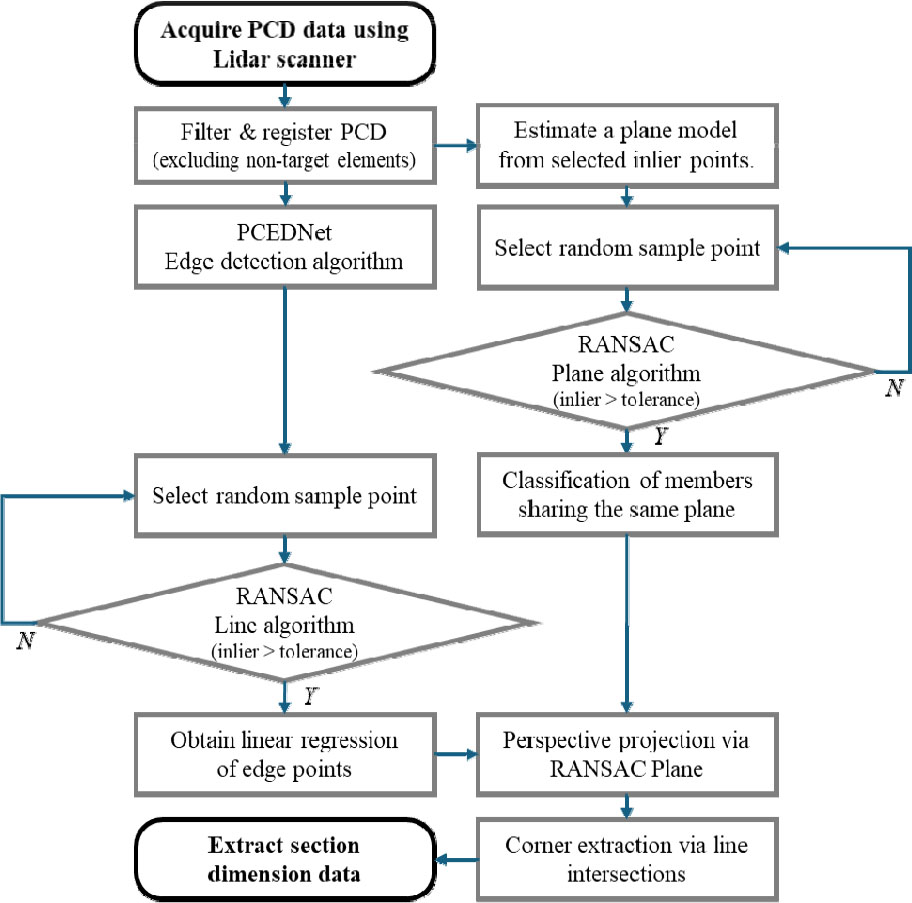
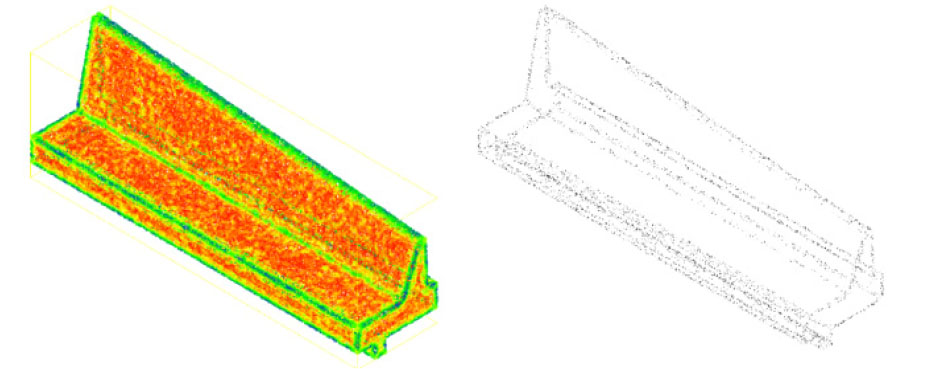
AutoDesk의 Revit 프로그램을 통해 모델링된 가상 옹벽 데이터는 MESH 형태의 STL 파일로 생성되며, 이후 Point Cloud Data를 다루는 Cloudcompare 프로그램을 이용하여 Point Cloud Data 형태의 TXT 파일로 변환하여 본 연구에서 사용하였다. TXT 파일의 Point Cloud Data 형태는 X,Y,Z좌표와 Normal Vector로 이루어져 있으며, Figure 1은 BIM으로 생성한 가상 옹벽 모델(Mesh)과 해당 모델을 Point Cloud Data로 변환한 3차원 형상을 나타낸다. Figure 2는 본 연구에서 제안하는 Point Cloud Data 기반 단면 수치 정보 및 길이 정보 자동 추출 기술을 나타낸 것이다.
2. 방법론
2.1 Random Sample Consensus (RANSAC)
대규모의 구조화되지 않은 Point Cloud Data에서 다양한 밀도를 지닌 객체의 특징을 추출하는 것은 상당히 도전적인 과제이다. RANSAC 알고리즘은 Point Cloud Data 간의 상관관계에 따라 노이즈를 제거하거나 Point Cloud Data의 특성에 따라 형상을 예측하는 데 유용하게 활용 되는 알고리즘이다. 이 알고리즘은 다양한 형태의 Point Cloud Data를 효과적으로 처리할 수 있는 장점으로, 다양한 Point Cloud Data 연구에 활용되고 있다. 항공 레이저 스캐닝을 통해 얻은 지붕 Point Cloud Data에 RANSAC 알고리즘을 적용하여 효과적으로 지붕의 특성을 분류한 연구가 있으며(Tarsha-Kurdi et al., 2008), Seq-NV-RANSAC 알고리즘은 계단의 평행하고 점진적인 평면을 정확하게 분류하기 위해 RANSAC의 기존 단점을 개선하여 재해석한 방법론이다(Awwad et al., 2010). 그 외에도 파이프나 교각과 같이 흔히 볼 수 있는 단면의 곡면을 감지하는 데 RANSAC 기반의 실린더 감지 알고리즘 연구도 활발히 진행되고 있다(Ballard, 1984).
RANSAC 알고리즘은 최소한의 데이터를 사용하여 수학적 모델을 구축하고, 일관된 데이터를 확장해가며 반복 작업을 통해 최적의 해를 도출한다. 이 알고리즘은 반복 횟수가 많아질수록 정확도가 향상되는 확률적 특성을 가지며, 비결정적 알고리즘에 해당한다. RANSAC을 적용하기 위해서는 데이터 내에 관심 대상(Inlier)과 노이즈(Outlier)가 명확히 구분되어야 하며, 수학적 모델로 표현이 가능해야 한다. 이러한 특성으로 인해 RANSAC은 Point Cloud Data의 특성과 상관관계 도출에 매우 적합하며, 관심 대상의 특성이 명확히 정의된다면 Point Cloud Data를 다루는데 강건한(Robust) 알고리즘이다.
2.1.1 RANSAC의 특징
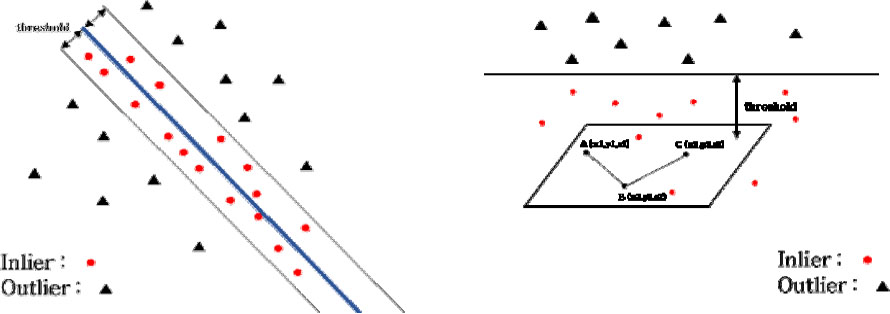
RANSAC 알고리즘은 사용자가 설정한 특성치의 임계값(Tolerance)을 기반으로 임계값을 초과하는 데이터를 제외하여 분류하고, 이를 통해 노이즈나 관심 대상이 아닌 데이터를 제거하여 최적의 데이터 모델을 찾아낼 수 있다. 여기서 임계값은 사용자가 임의로 설정한 직선, 평면, 원기둥, 구 등과의 거리를 의미하며, 이 임계값을 초과하는 Point Cloud Data는 아웃라이어(Outlier)로 분류된다. 반면, 임계값 내에 위치하는 Point Cloud Data는 인라이어(Inlier)로 간주된다.
따라서, RANSAC 알고리즘의 핵심은 임계값 내에 가장 많은 인라이어를 포함하는 직선, 평면, 원기둥, 구 등을 최적의 대표 형상으로 도출하는 것이다. 이 과정은 노이즈에 강건한 모델을 생성하여, 실제 다양한 PCD 응용에서의 유용성과 유연함을 갖는다.
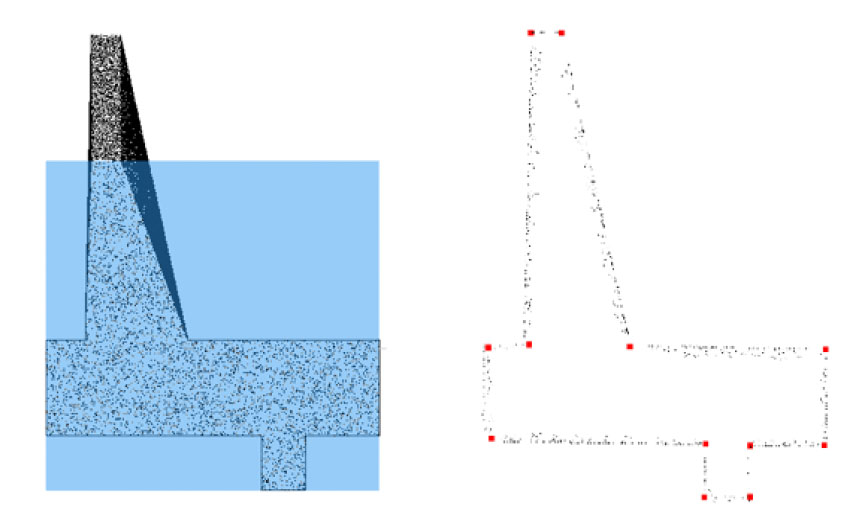
Figure 3은 RANSAC을 통해 도출하는 방법론 중 평면과 직선의 대표 형상 도출 과정을 인라이어와 아웃라이어 점들을 임계값 기준으로 시각화하여 나타내었다.
이때, 대상 형상을 도출하기 위해 RANSAC 알고리즘을 수행하는 횟수(N)은 수식 (1)을 통해 결정된다. 여기서, P는 확률, S는 데이터 개수, E는 인라이어와 아웃라이어의 비율이다.
RANSAC 알고리즘은 초기에 임의의 두 점 혹은 세 점을 선택하여, 이를 바탕으로 최적의 대상 형상을 얼마나 효과적으로 도출할 수 있는지 판단한다. 이 과정에서 중요한 파라미터는 인라이어(Inlier)와 아웃라이어(Outlier)의 비율(E), 실행에 필요한 최소한의 데이터 포인트 수(S)를 포함하는 미니멀 셋(Minimal set), 그리고 대상 형상을 정밀하게 도출하기 위한 임계값이다.
이러한 파라미터들은 알고리즘 실행 횟수(N)를 결정하는 데 핵심적인 역할을 한다. RANSAC 알고리즘은 파라미터들을 바탕으로 N번 반복 실행되며, 충분한 수의 인라이어가 확보되면 가장 적합한 형상을 대표 형상으로 도출하게 된다. 확률(P)은 이 반복 과정에서 가장 적합한 결과를 얻을 확률을 정의하며, 이는 알고리즘의 성공률을 예측하는 데 중요한 요소로 작용한다.
2.1.2 RANSAC (Plane) 적용
본 연구에서는 RANSAC 알고리즘을 이용하여 반중력식 가상 옹벽의 Point Cloud Data에서 다양한 평면을 식별하는 과정을 수행하여 점들을 분류 후 Plane을 도출하였다. 점들을 분류하는 기준은 각각의 평면에서 임계값 내에 존재하는 Point Cloud Data을 기반으로 하며, 반중력식 가상 옹벽의 경우 13개의 그룹으로 분류하였다. 이는 길이를 도출하기 위한 마지막 절차인 2.3.2절에서 윤곽선 Point Cloud Data를 정사영시킬 평면을 도출하는데에 사용된다.
RANSAC 알고리즘을 통한 평면 도출 과정은 평면을 형성하기 위해 필요한 최소 점의 개수에 영향을 받는다. 본 연구에서는 이 최소 점의 개수를 1,000개에서 4,000개까지 조정하여 매개변수 해석을 수행하였으며, 조정된 매개변수 점의 개수에 따라 RANSAC을 통해 식별되는 평면의 개수가 어떻게 변화하는지 분석하였다. Figure 4는 RANSAC의 매개변수인 최소 점 개수의 변화에 따른 평면의 개수를 나타내며, 이 매개변수 분석 결과는 RANSAC 알고리즘의 효율성 및 적용 가능성을 평가하는 데 중요한 지표로 활용되었다. Table 1은 반중력식 옹벽 13개의 그룹으로 분류했을 때 각 그룹당 속하는 점의 개수를 나타내었다.
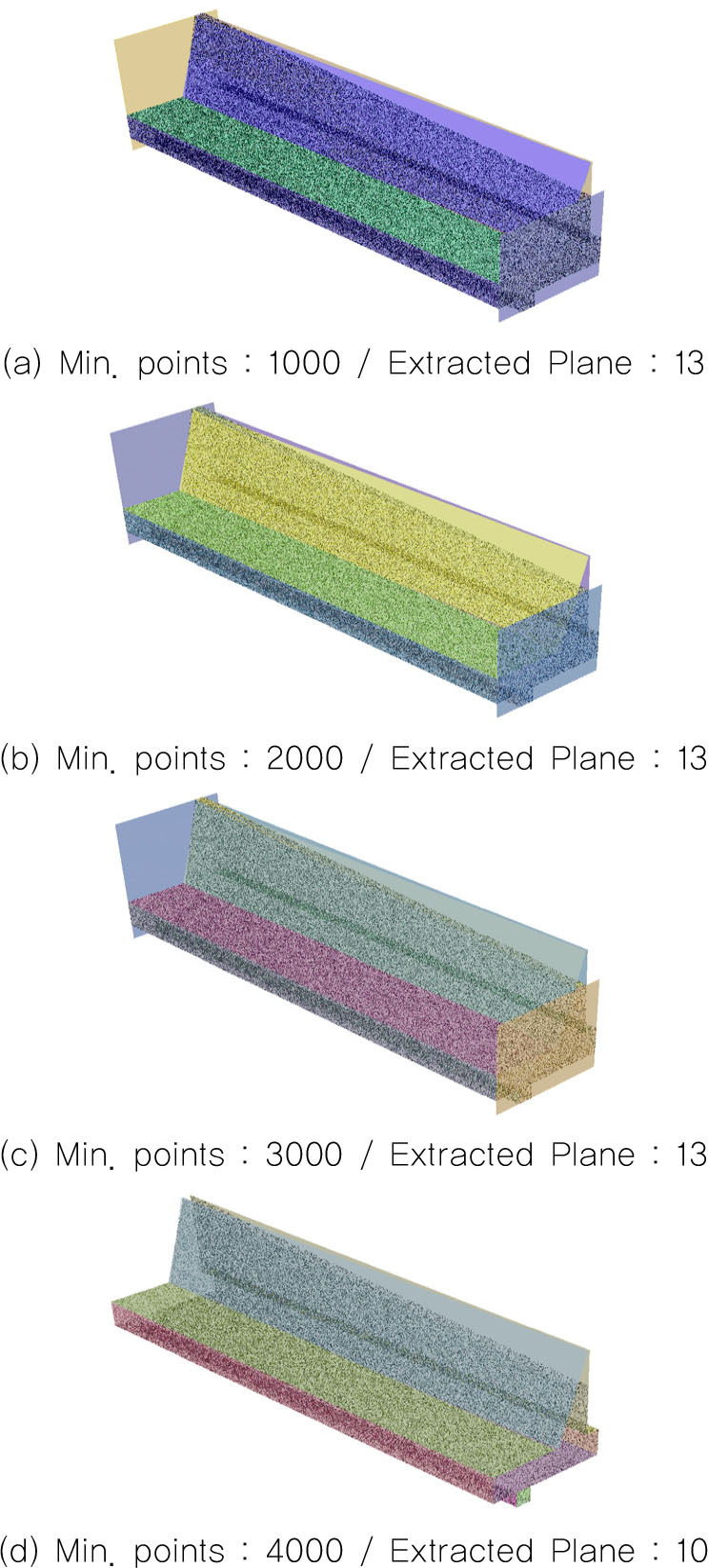
Table 1.
Segmentation into 13 groups of virtual anti-gravity retaining walls
RANSAC 알고리즘을 활용하여 평면 형성을 위한 최소 점 개수를 2,000개로 설정한 경우, 13개의 평면을 가장 성공적으로 도출할 수 있었다. 적절한 RANSAC의 최소 점 개수를 기반으로, 가상 옹벽 Point Cloud Data를 13개의 명확한 평면 그룹으로 분류하였다(Figure 5). 각 그룹은 독립적인 평면에 해당하는 점들로 구성되어 있으며, 이를 통해 옹벽 Point Cloud Data 활용에 RANSAC 알고리즘의 효율성과 정확성을 검증하였다.

2.2 Edge detection
대규모 데이터 세트에서 구조물 윤곽선에 위치한 Point Cloud Data를 감지 및 분류하는 것은 구조물 분석에 다방면으로 활용 가능하다. 본 연구는 구조물의 길이와 위치 정보를 정확히 파악하기 위해 구조물의 윤곽선에 위치한 Point Cloud Data 분류가 필수적임을 나타내었다. 특히, 작은 데이터부터 큰 Point Cloud Data에 이르기까지 점들의 진행 방향 벡터를 분석하고, 이 벡터의 진행 방향 각도가 클수록 해당 수치를 정량화할 수 있는 알고리즘 개발의 필요성을 강조한다.
현재 2D 이미지를 활용하여 선 특징을 추출하고 이를 3D 선으로 변환하는 연구가 활발히 진행되고 있음에도 불구하고, 점 밀도가 크게 변하고 규칙적인 이웃 구조가 없는 3D Point Cloud Data의 윤곽선을 추출하는 연구는 상대적으로 드물다. 이와 관련하여 도면이 존재하지 않는 문화유산 건축물을 대상으로 2D 및 3D 도면을 생성하기 위해 윤곽선에 위치한 Point Cloud Data를 추출하여 도면을 생성하는 데 기여한 바 있다(Betsas & Geogopoulos. 2022). 또한, 다양한 스케일의 물체를 활용하여 Point Cloud Data의 진행방향을 파악함으로써 부드럽고(smooth) 날카로움(sharp)의 정도를 수치화해서 나타내는알고리즘인 PCEDNet을 연구한 사례가 있다(Himeur et al., 2020). PCEDNet의 효과성은 CAD 모델에서의 적용뿐만 아니라 실제 형상의 예시에서도 입증되었다. 이 네트워크는 다양한 데이터에 대한 효율성을 보여주며, 기존의 지오메트릭 윤곽선 감지 접근법, 포인트 기반 처리 네트워크, CNN 및 완전 연결 신경망(FC)과 비교하여 우수한 성능을 보였다.
이러한 특성으로 인해 PCEDNet은 3D Point Cloud Data 처리에 있어서 윤곽선 감지의 새로운 가능성을 제시하며, 다양한 응용 분야에서의 활용 가능성이 매우 높다.
본 장에서는 PCEDNet 알고리즘을 활용하여 옹벽의 Point Cloud Data에서 표면방향이 급격하게 변하는 점들을 자동으로 감지하는 방법에 대해서 설명한다.
2.2.1 Edge detection 적용
본 연구에서는 Point Cloud Data 내에서 윤곽선에 위치한 점들이 기하학적 불연속성을 나타내는 선형 특성을 가짐을 확인하였다. 윤곽선에 위치한 점들은 주변 점들과 비교하여 진행 방향의 비정상적인 불연속성을 보이는 것이 특징이다. 이러한 특성을 정량적으로 분석하기 위해, 임의의 점을 중심으로 그 이웃하는 점군의 기하학적 구조를 활용하여 Planarity 특성을 수치화하였다.
Planarity 계산에 있어서 주요 파라미터는 점의 밀도와 해당 점에서 이웃한 점들까지의 거리 설정에 따라 달라진다. 본 연구는 두 가지 실험을 통해 Planarity의 정도를 분석하였다. 첫 번째 실험에서는 이웃한 점까지의 거리를 고정시키고 점의 밀도를 변화시켜 가며 Planarity의 변화를 관찰하였다. 두 번째 실험에서는 점의 밀도를 고정하고 이웃한 점까지의 거리를 변화시켜 가며 Planarity의 정도를 측정하였다.
Figure 6과 Figure 7은 이 두 가지 조건에 따라 변화하는 Planarity의 정도를 확인하고, 이 데이터를 바탕으로 최적의 윤곽선을 도출하였다. 이 결과는 Point Cloud Data에서 윤곽선을 보다 정확하게 감지하고 해석하는 데 기여할 것으로 기대된다.
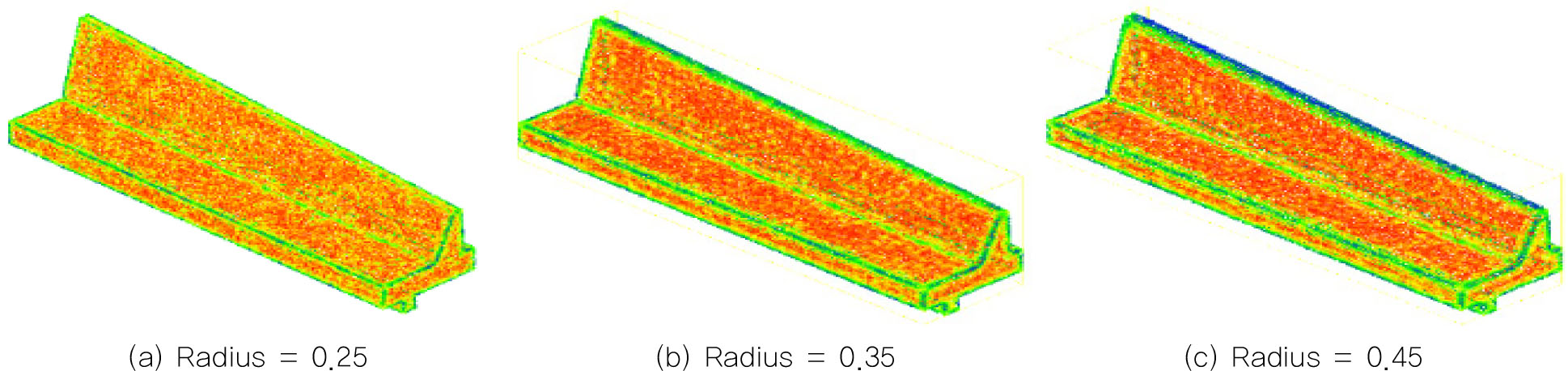
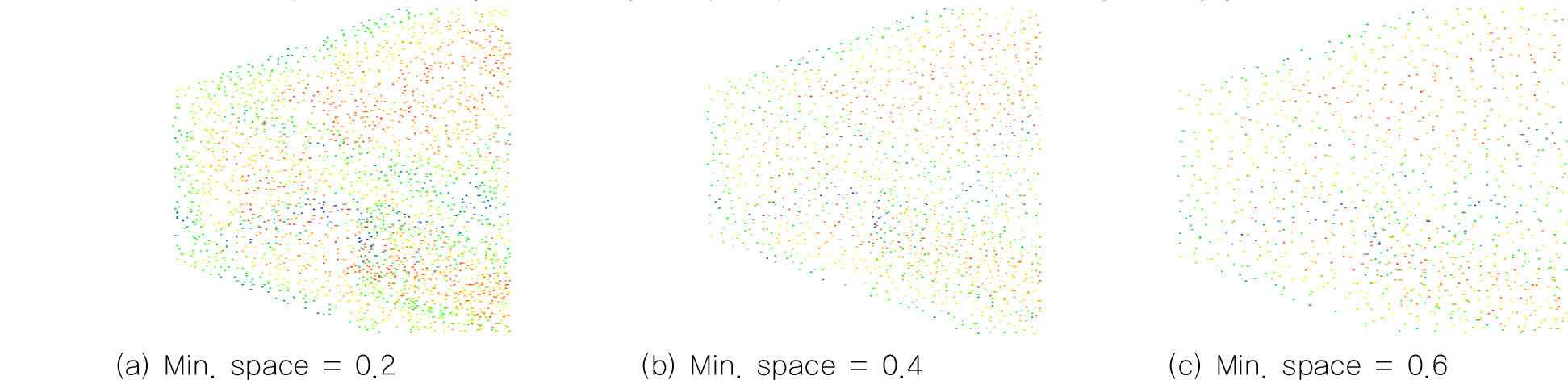
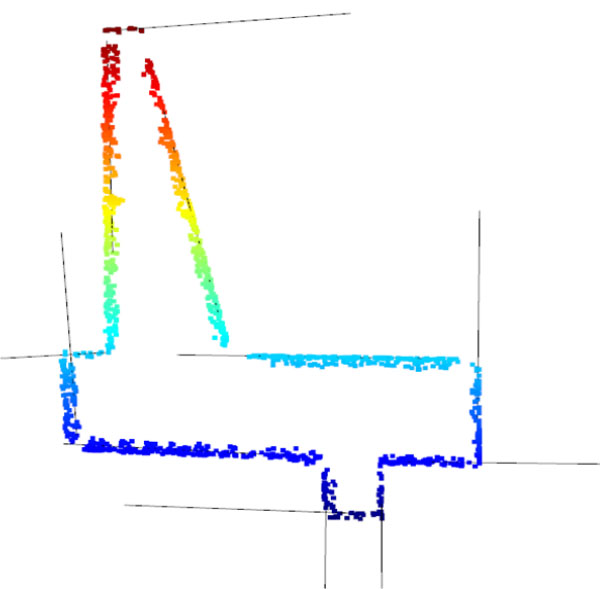
윤곽선 감지의 최적화를 위해 다양한 파라미터 설정을 실험하였다. 특히, Radius = 0.35 및 최소 공간(min. space) = 0.4 설정이 Point Cloud Data의 Planarity를 가장 잘 나타내는 조건으로 확인되었다. 이 파라미터들을 적용하여, Point Cloud Data의 진행 방향에 따른 Planarity의 변화를 그래프로 나타내었다.
그래프에서는 Point Cloud Data의 Planarity 수준을 색상으로 구분하여 표현하였다. 빨간색은 Planarity 수준이 높고 벡터의 진행 방향이 일정한 점들을 나타내며, 이는 구조적 안정성이 높음을 의미한다. 반대로 파란색은 벡터의 진행 방향이 빈번하게 변하는 점을 나타내며, 이는 변동성이 높은 영역임을 시사한다.
이러한 시각적 분석은 Point Cloud Data의 구조적 특성을 더욱 명확하게 이해하는 데 중요하며, 윤곽선 감지 알고리즘의 정밀도를 향상시키는 데 기여할 수 있다. Figure 8은 이러한 Planarity의 변화를 직관적으로 보여준다.
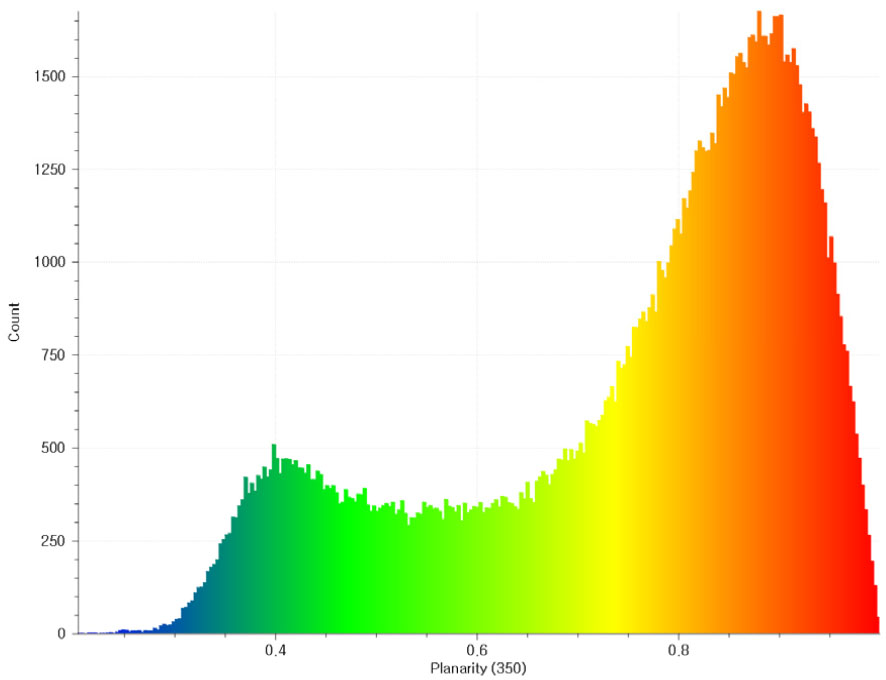
Point Cloud Data에서 윤곽선에 가장 가까운 점들만을 선택적으로 남기고 나머지를 제거하는 정제 과정을 수행하였다. 이 과정은 주로 적절한 Planarity 수준을 유지하는 점들을 유지함으로써, 윤곽선 감지의 정확도를 최대화하는 데 중점을 두었다. 특히, Planarity 값이 0부터 0.65 범위에 해당하는 점들을 유지하고, 그 이외의 점들은 데이터에서 제거하였다.
이러한 접근 방식은 윤곽선에 위치한 점들의 밀도가 감소할 가능성을 고려하여 신중하게 선택되었다. 데이터의 밀도가 감소하면, 수치 도출 시 정확도에 영향을 줄 수 있으므로, 이를 최소화하기 위한 조치가 필요하다. 윤곽선에 인접한 점들만을 남기는 과정은 많은 데이터를 제거해야 하기 때문에, 이를 통해 윤곽선의 정의와 감지를 더욱 명확히 할 수 있으나, 동시에 데이터의 대표성을 유지하는 데 있어서도 주의가 필요하다.
Figure 9와 같이 이 과정을 통해 얻어진 Point Cloud Data 형태의 윤곽선은 옹벽 구조물의 길이 정보를 파악하는데 중요한 역할을 한다.
2.3 교점
구조물의 길이와 위치 정보를 정확하게 산출하기 위해, 윤곽선에 위치한 점들을 직선 형태로 변환하고 이들 간의 교점을 구하는 방법을 적용하였다. 본 연구에서는 RANSAC 알고리즘을 사용하여 윤곽에 위치한 점들로부터 3차원 직선의 방정식을 도출하고, 직선들 간의 교차점을 찾아 구조물의 길이를 계산한다.
하지만, RANSAC을 통해 도출한 직선들은 3차원 공간에서 임의의 방향으로 꼬인 위치에 있을 가능성이 높으며, 이는 교점 계산을 복잡하게 만들 수 있다. 이 문제를 해결하기 위해, 본 연구는 2.1.2절에서 제안된 방법을 통해 RANSAC으로 도출된 각 평면에 속하는 점들을 해당 평면에 정사영시켜 직선을 재정의하고, 이러한 정사영된 직선들의 교차점을 계산하였다.
이 접근 방식은 3차원 구조물의 정확한 위치 및 길이 정보를 획득하는 데 필수적이며, 구조물의 특성화 및 분석에 중요한 정보를 제공한다. 정사영 과정을 통해 직선의 교차점을 보다 정확하게 계산할 수 있어, 3차원 모델링과 같은 응용 분야에서의 정밀도를 향상시킬 수 있다.
2.3.1 RANSAC (Line) 적용
반중력식 가상 옹벽 한 면의 윤곽선(Line)을 포인트 클라우드 데이터로부터 정확히 도출하기 위해 RANSAC 알고리즘을 적용하였다. 이 알고리즘을 통해 옹벽의 각 변에 위치한 점들로부터 최적의 직선을 도출하였다.
포인트 클라우드 데이터의 밀도와 임계값은 도출되는 직선의 방향에 큰 영향을 미치므로, 정확도를 높이기 위해 임계값을 0.01m로 고정하였다. 이 정밀한 설정을 통해 데이터의 정확성을 확보할 수 있었다.
적용 결과, Figure 10과 같이 가상 옹벽 한 면에 대해 총 12개의 서로 다른 직선이 도출되었다. 이 직선들은 옹벽의 구조적 특성을 정의하는 데 중요한 역할을 한다. 이러한 직선들의 도출은 구조물의 길이 도출에 있어 중요한 기초 데이터를 제공한다.
2.3.2 정사영 후 교점 도출
앞서 RANSAC 알고리즘을 활용하여 3차원 공간 상의 직선을 도출하였으며, 이 직선들은 공간상에서 서로 꼬인 위치에 존재할 가능성이 높다. 이로 인해 직선들 사이의 교점을 찾는 과정이 복잡해질 수 있다. 이 문제를 해결하기 위해 본 연구에서는 두 단계의 RANSAC 알고리즘을 적용하였다.
첫 번째 단계에서는 RANSAC(Line)을 통해 각 점들의 직선 방정식을 도출한다. 이후, 두 번째 단계에서는 2.1.2절에서 언급한 RANSAC(Plane)을 통해 생성된 평면에 첫 번째 단계에서 도출된 직선들을 정사영함으로써, 각 직선이 평면 상에서 교차하는 위치를 명확히 한다. Figure 11은 정사영을 통해 도출한 교점을 시각화하였다.
정사영된 직선들은 공간상에서 한 점에서 만나는 특성을 보이며, 이 교점은 각 직선의 위치 관계를 정확히 나타내는 중요한 데이터로 활용된다. 정사영 과정을 통해 각 직선에 대한 교점이 1개 이상 도출되며, 이 교점들은 구조물의 3차원 모델링 및 분석에 중요한 역할을 한다.
이 방법론은 3차원 Point Cloud Data에서 직선과 평면의 관계를 이용하여 보다 정확한 구조적 정보를 추출할 수 있도록 한다. 또한, 복잡한 3차원 구조에서 구조적 요소들의 정확한 위치와 관계를 파악하는 데 기여한다.
3. Validation
3.1 Data preparation
Figure 12와 Figure 13은 8개의 옹벽을 Point Cloud Data 형태 및 단면도 형태로 시각화한 것이다.
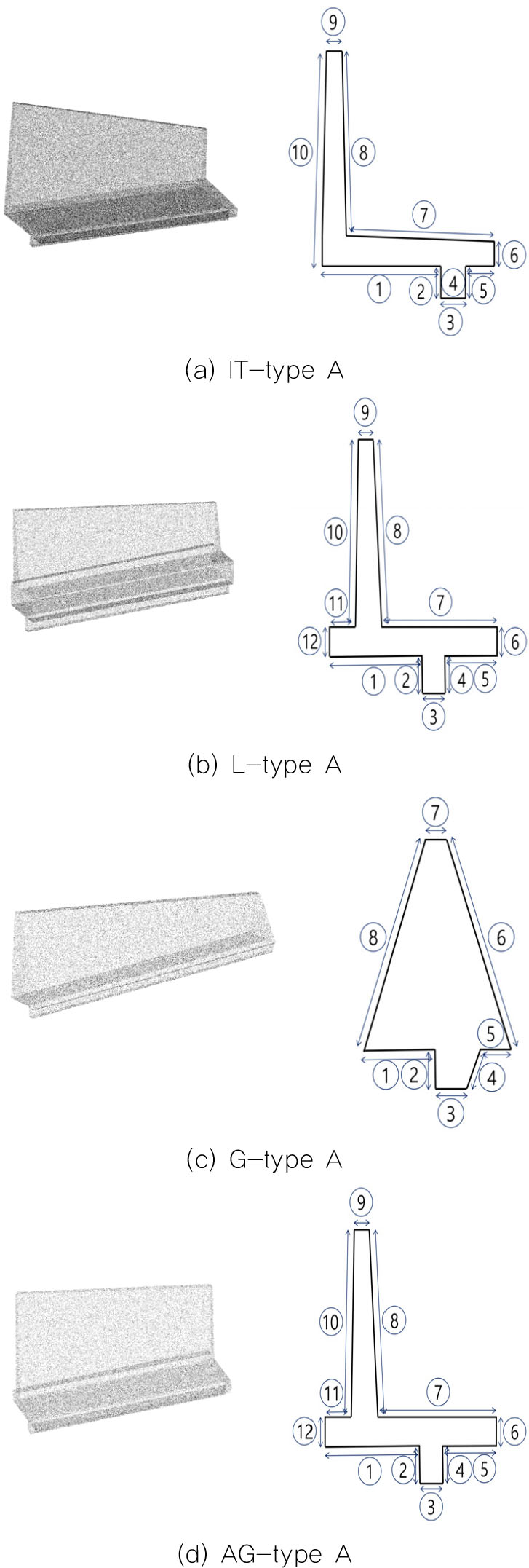
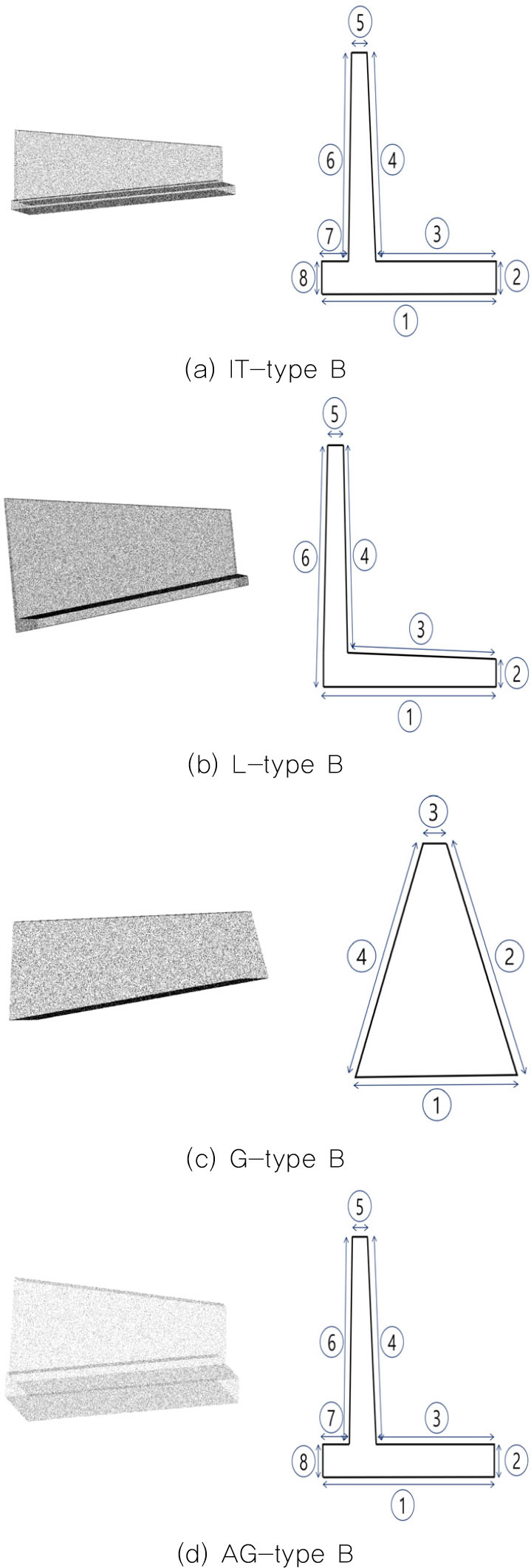
단면도에서 각 선분에 부여된 숫자들은 ‘Cross-section number’로 칭하며, 이는 옹벽에서의 각 선분의 길이 정확도를 확인할 때 사용된다.
실험에 사용한 옹벽의 종류는 역T형 옹벽(IT), L형 옹벽(L), 중력식 옹벽(G), 반 중력식 옹벽(AG)으로, 각 유형별로 두 개씩 총 8개의 가상 옹벽을 실험 데이터로 사용하였다.
본 연구에서 생성한 8개의 가상 옹벽 모델 각각 높이 차를 가지고 있는 옹벽으로, 좌측 단면과 우측 단면의 길이 정보가 서로 다를 수 있다. 따라서, 실험 시 좌측 단면과 우측 단면의 길이를 따로 계산하여 정확도를 나타내었다.
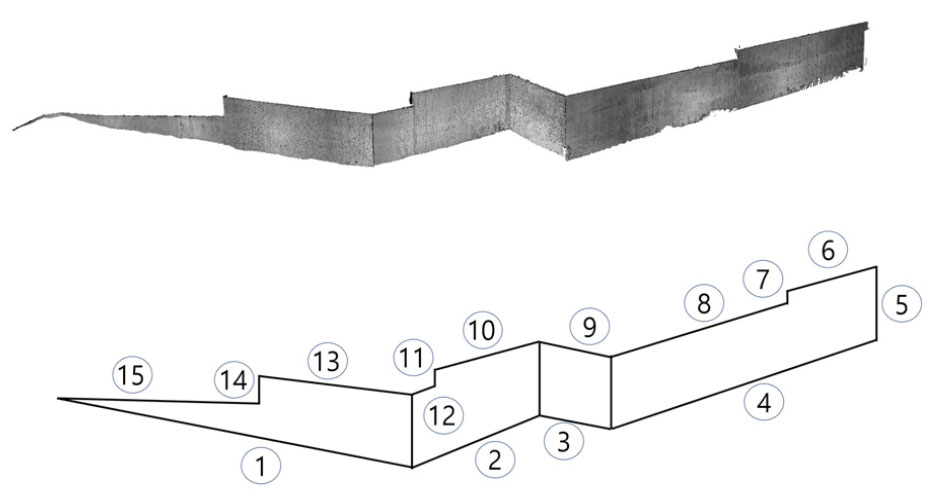
본 연구에서는 인천광역시에 위치한 실제 옹벽을 대상으로 3D LIDAR 스캐닝을 수행하였다. 옹벽의 명확한 형태만을 남기기 위해서 상용 프로그램을 통해 주변 식생, 도로, 차량 등의 노이즈를 제거하여 Figure 14에 Point Cloud Data 형태와 단면도 형태로 시각화하였다.
3.2 성능 평가
본 연구에서는 가상 옹벽의 단면 수치 정보를 자동화하여 도출하고, 결과값의 오차를 평가하기 위해 Mean Absolute Percentage Error (MAPE) 방법을 채택하였다. MAPE는 인공지능 분야에서 널리 사용되는 오차율 판정 방법으로, 비율 변수의 특성을 갖기 때문에 비율로 해석이 의미 있는 값에 주로 적용된다.
MAPE는 직관적인 지표 제공의 장점을 가지며, 스케일에 의존하는 다른 오차율 판정 방법들과 달리 스케일에 영향을 받지 않아 전체 지표의 특성을 객관적으로 반영할 수 있다. 이 연구에서는 각 옹벽의 단면에 대한 길이 값을 10회 반복 측정하여 예측하고, 이를 통해 도출된 각 직선의 길이에 대한 MAPE를 계산하였다.
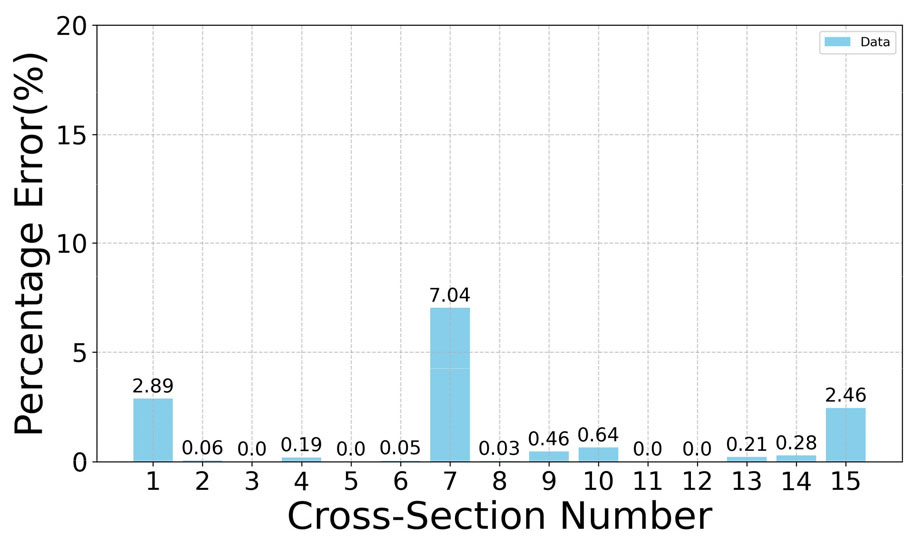
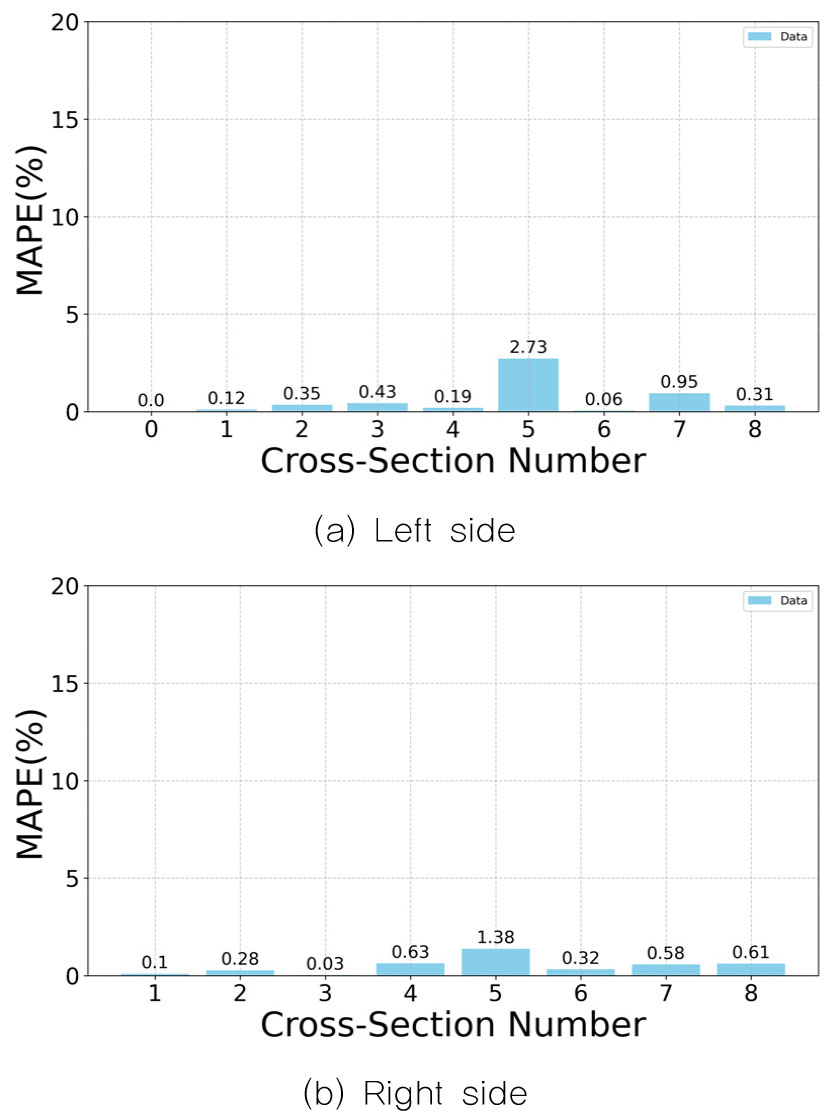
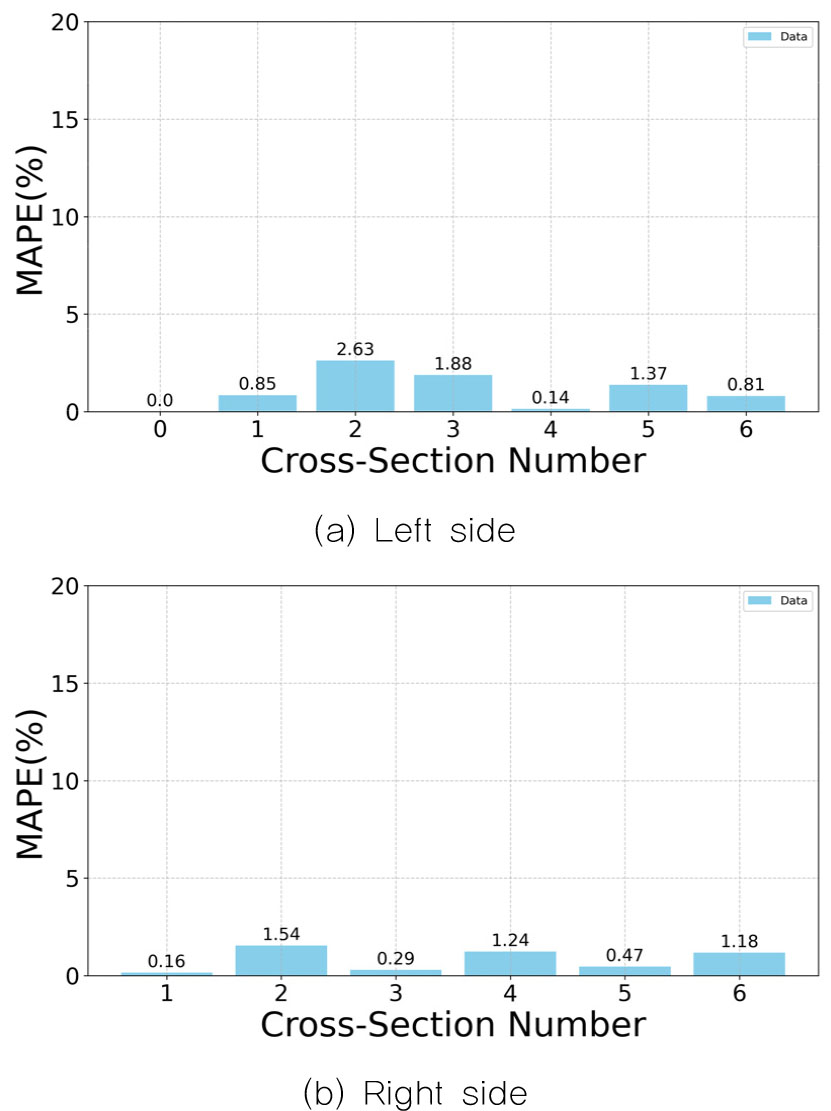
좌측면과 우측면 단면의 길이 변동이 있는 옹벽을 고려하여, 각면에 대한 MAPE를 별도로 계산하고 그래프로 나타내었다. 그래프의 X축은 숫자로 라벨링된 각 직선을 나타내고, Y축은 해당 직선 길이를 10회 측정하여 예측했을 때의 MAPE를 표시하였다. 여기서, 각 옹벽 좌측면의 MAPE 그래프에서 X축 좌표 ‘0’은 옹벽의 폭을 나타낸다.
8개의 가상 옹벽에 대해 길이를 자동화 도출하여 오차율을 MAPE 방식으로 분석하였다(Figure 15, 16, 17, 18, 19, 20, 21, 22). 대부분 길이의 MAPE가 5%내에서 값을 가지고 것으로 나타난다. 하지만, Figure 15-(a) 11번, Figure 16-(a) 9번, Figure 22-(a) 7번 선분에서 길이의 MAPE가 5%를 초과하는 것을 확인할 수 있었다. 이러한 결과에 대한 분석을 진행한 결과, 오차율이 높게 나타난 세 개의 선분에서는 길이가 상대적으로 짧은 것과 더불어, 윤곽선의 Point Cloud Data의 밀도가 낮은 것이 공통적인 특징으로 나타났다. 낮은 밀도의 Point Cloud Data는 RANSAC 알고리즘을 활용하여 직선을 생성할 때, 최적의 직선을 도출하는 데 필요한 반복 횟수가 적어지며, 이는 직선 도출의 정확도를 감소시킬 수 있다.
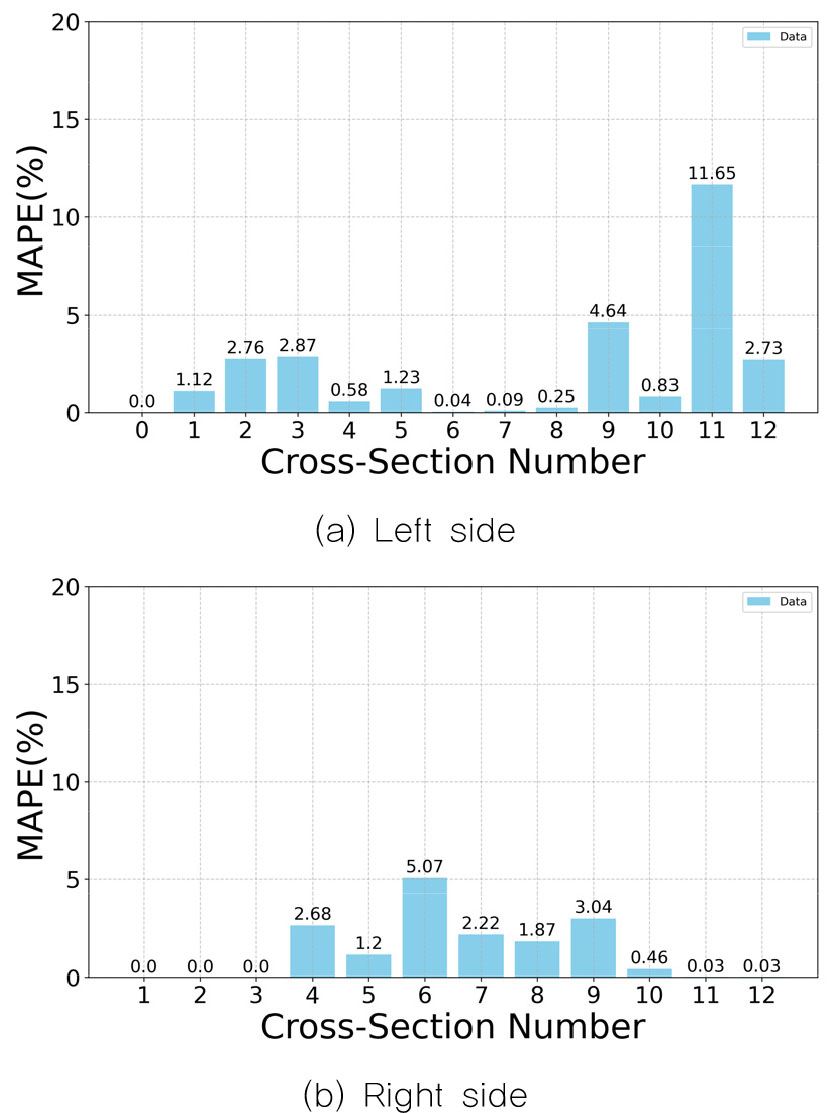
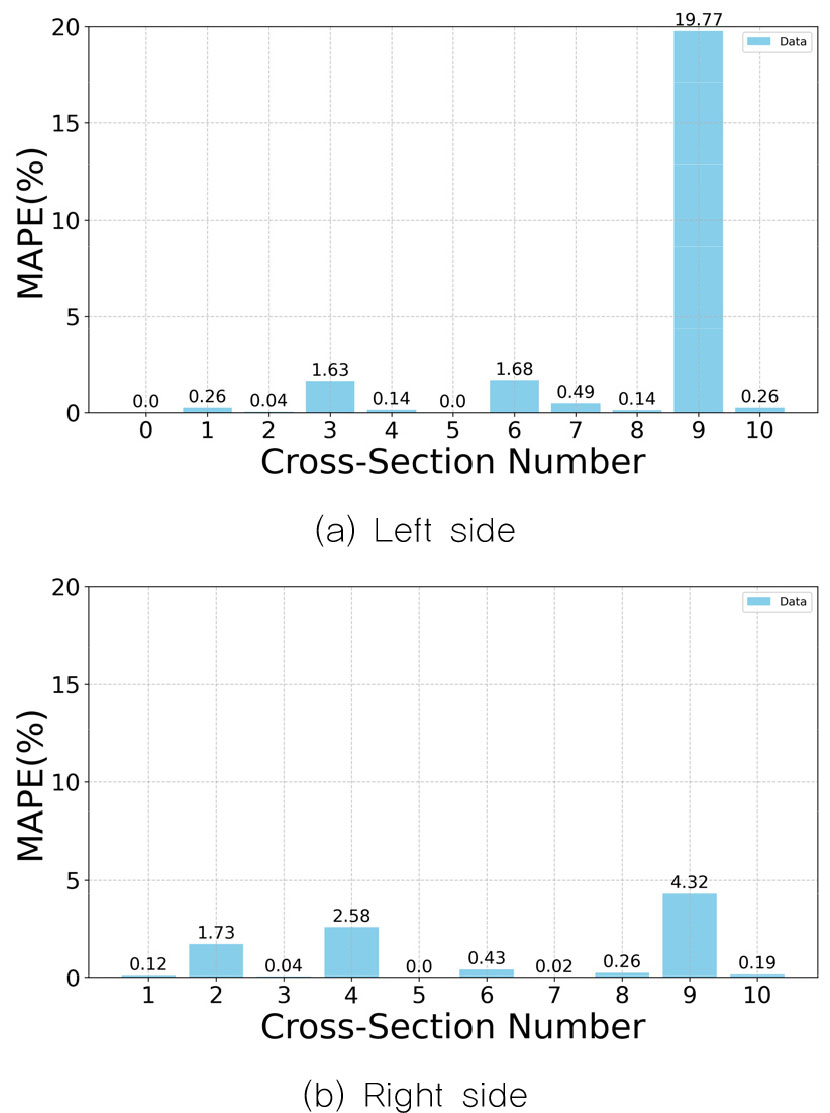
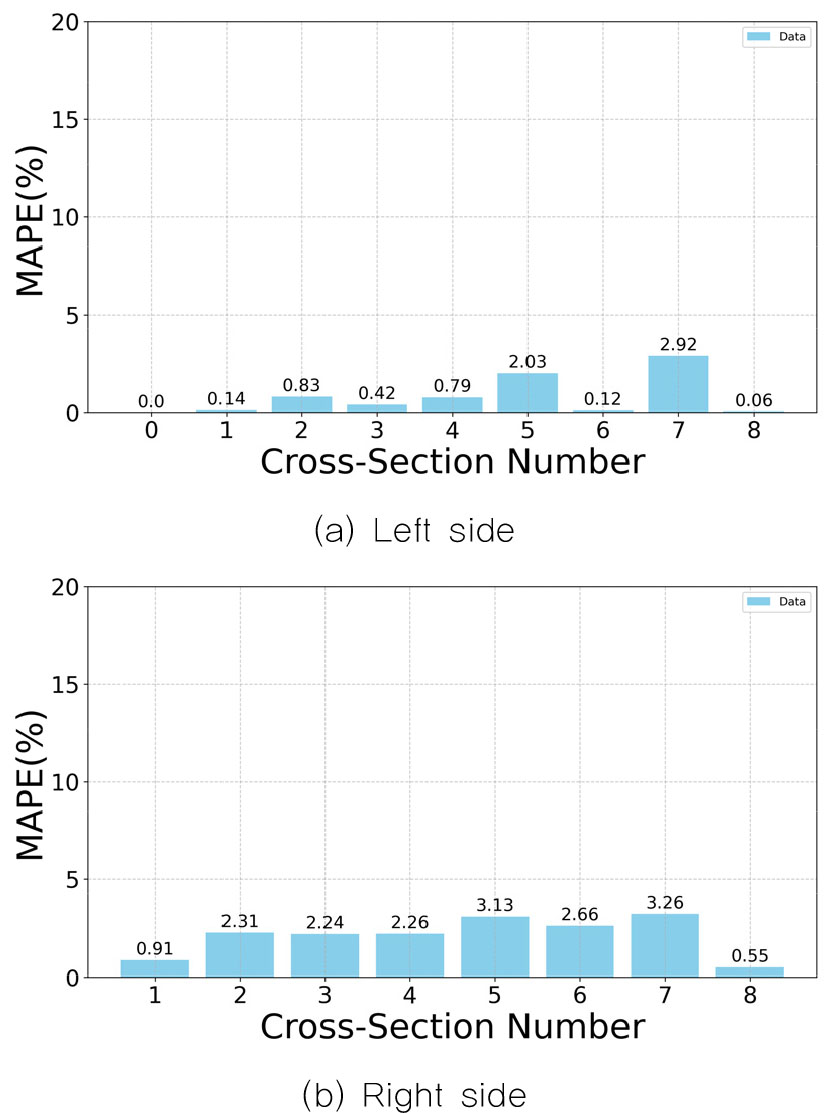
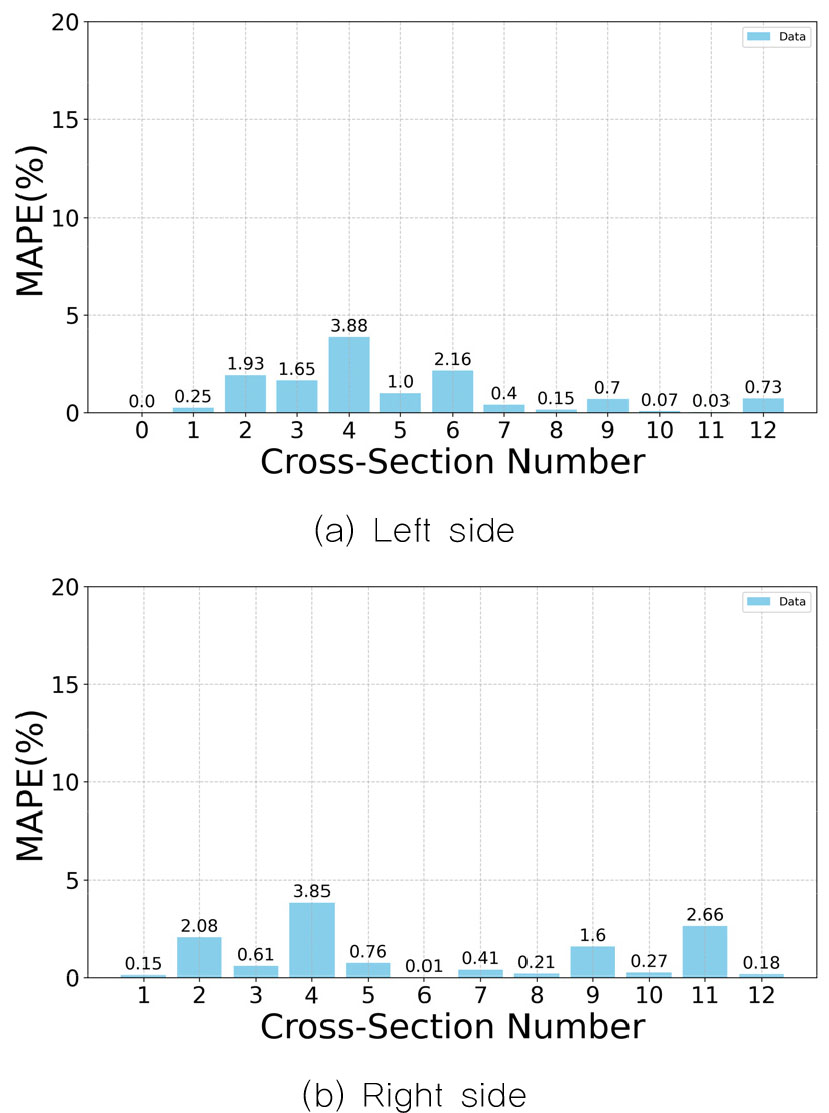
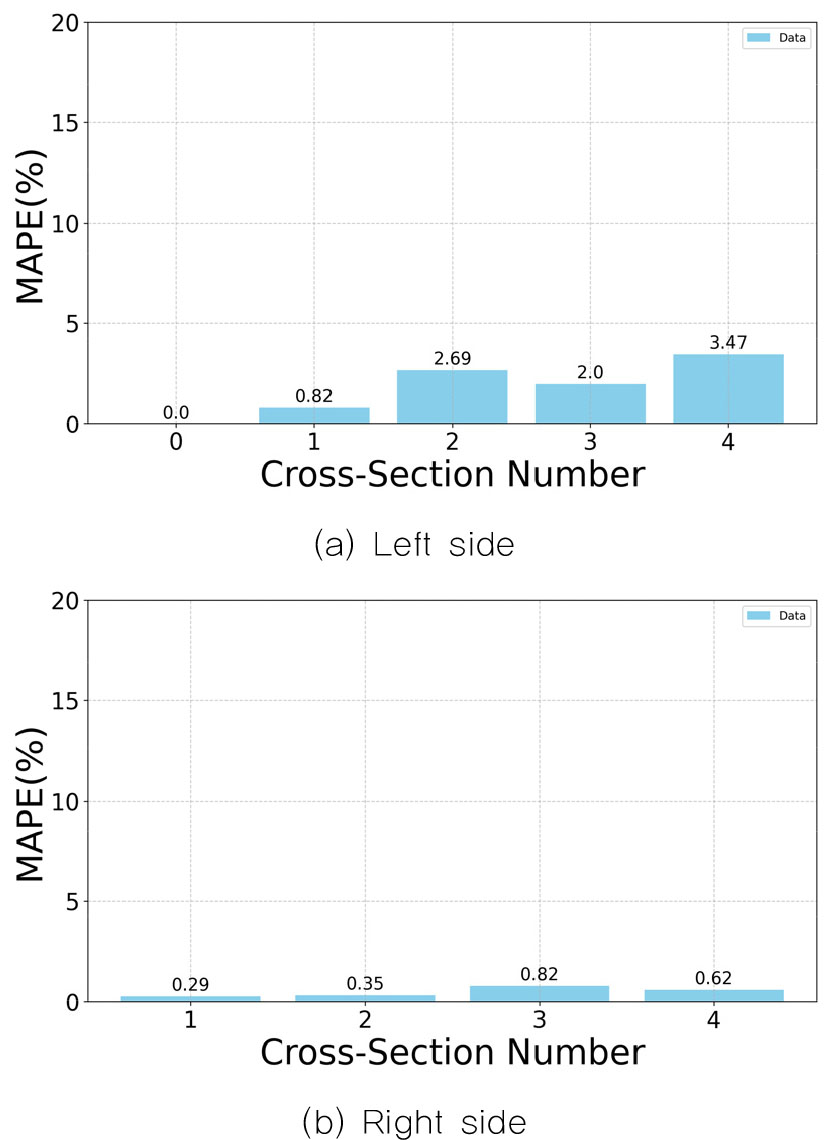
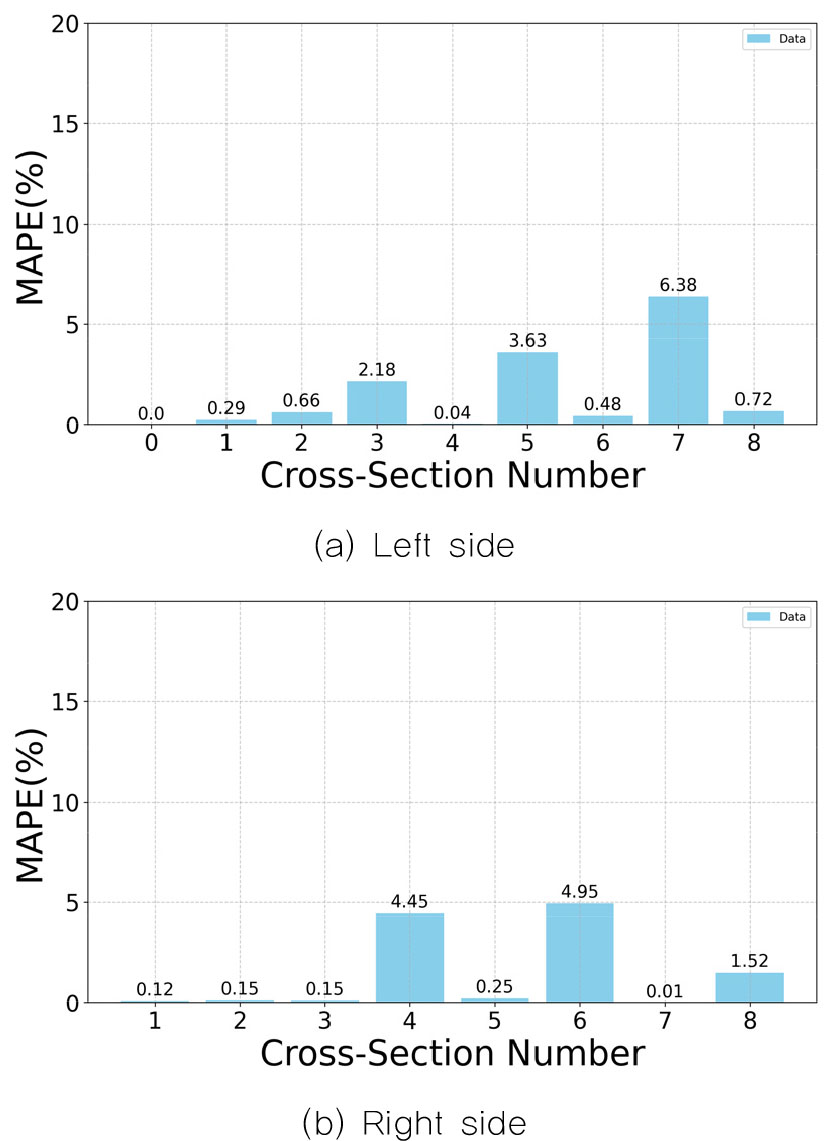
RANSAC 알고리즘은 데이터의 밀도에 기반하여 최적의 직선을 추정하는데, 밀도가 낮은 Point Cloud Data는 적절한 비교군이 부족하여 직선 추정 시 오차가 증가할 수 있다. 이는 특히 길이가 짧고, 점의 밀도가 낮은 영역에서 두드러지게 나타난다. 따라서, 이러한 지점에서의 길이 측정은 오차율이 상대적으로 높게 나타나는 경향을 보인다.
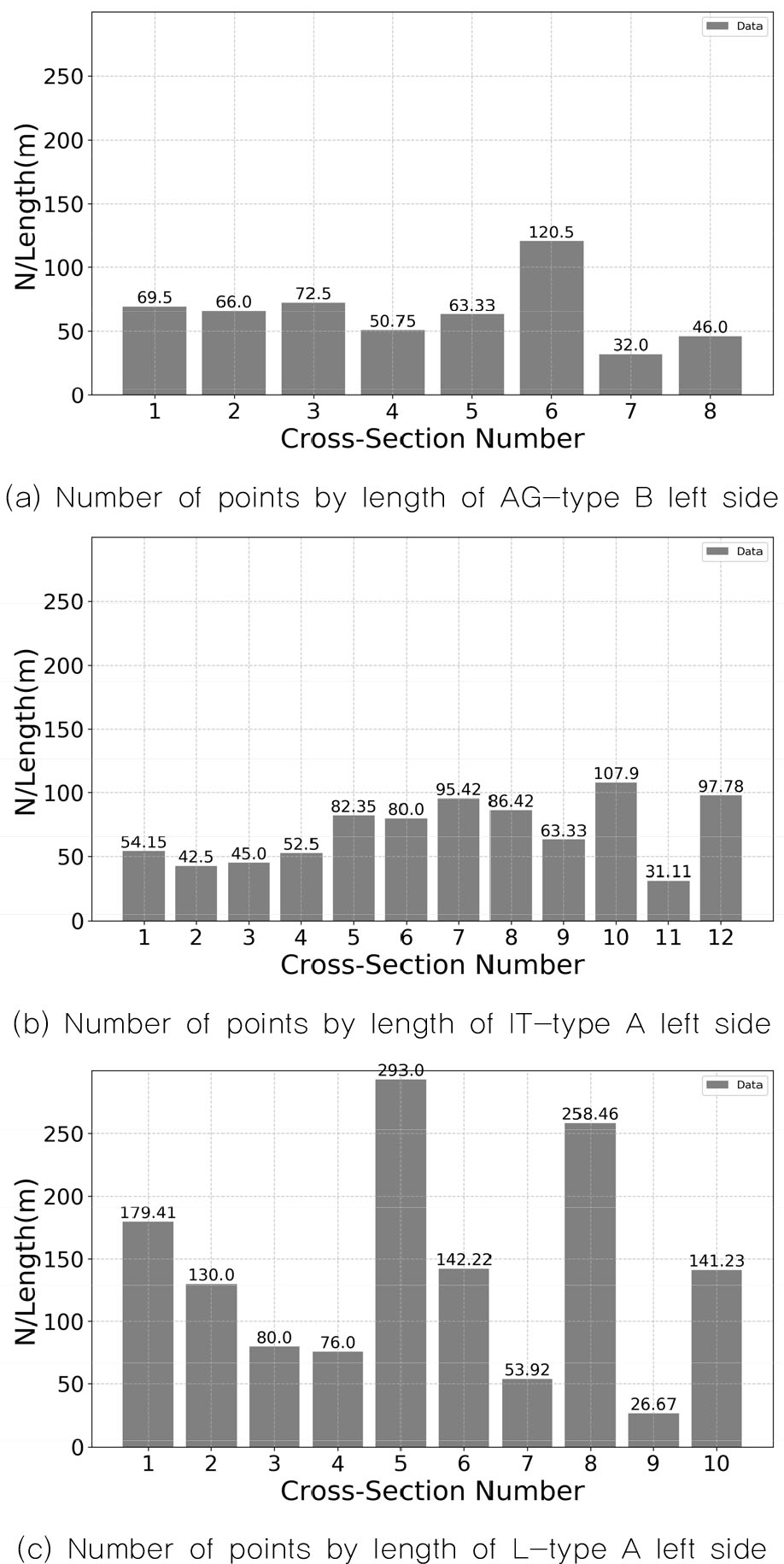
Figure 23은 단면의 각 선분의 길이별 점의 개수를 나타내었다. 길이 오차율이 컸던 선분이 Number of points/length (m)값이 상대적으로 작게 나타나는 것을 확인할 수 있다.
3.3 검증 결과
Table 2는 같은 방법을 이용하여 실제 옹벽의 길이를 도출한 결과값이다. 실제 옹벽의 실측값의 경우 3D LIDAR를 통해 도출하였고 본 방법론을 통해 예측값을 도출하여 각각의 선분별 오차율을 확인하였다.
Table 2.
Measurements, predictions, and error rates (%) of actual retaining wall
4. 결론
본 연구는 옹벽의 Point Cloud Data를 활용하여 길이 정보를 자동화 도출하는 것을 목표로 진행되었다. 이 연구에서는 8개의 가상 옹벽 데이터와 1개의 실제 옹벽 데이터를 통해 단면 길이를 도출하였다. 가상 옹벽 데이터의 경우 각 단면의 선분별 MAPE의 값이 대부분 5% 이내인 것을 확인할 수 있지만 일부 선분에서는 예외적으로 높은 오차율이 나타나는 것을 확인할 수 있었다.
오차율은 Figure 24와 같이 점의 밀도에 따라서 변화될 수 있기 때문에 오차율을 줄이고 더 정밀한 정확도를 달성하기 위해, 윤곽선 Point Cloud Data의 수를 증가시키고 추가적인 정합 작업을 수행하는 연구가 필요함을 제안한다. 또한, 검증에 사용된 실제 옹벽의 경우, 가상 옹벽과는 달리 스캐너로 추출할 수 없는 형상 정보의 존재가 확인된다. 이러한 형상 정보, 특히 지반에 묻힌 부분 등은 스캔을 통해 취득할 수 있는 정보와 함께 옹벽의 표준도를 기반으로 가정하는 방법을 제안한다.
우리나라 정부는 2030년까지 모든 공공공사에 Building Information Modeling (BIM)을 의무적으로 도입할 계획임을 밝혔다. 그러나 현재 시설물안전법 하에 관리되는 3종 시설물의 경우, 설계 및 시공 시 사용된 도면의 부족하거나 수기로 작성된 경우가 많아 BIM 모델을 생성하는 데 있어 한계가 존재한다. 이러한 문제를 해결하기 위해, 도면이 부재하거나 수기로 작성된 옹벽에 대한 Scan-to-BIM 기술의 활용은 시간 및 비용 절감뿐만 아니라, 정확도 향상에도 기여할 것으로 기대된다.