

1. 서 론
1.1 연구의 배경 및 목적
1.2 연구의 범위 및 방법
2. 이론적 고찰
2.1 건축물 방화 시설 및 제도
2.2 현행 방화 시설 모니터링 접근방식
2.3 BIM 기반 운영 및 유지관리
2.4 Depth Estimation
3. 연구 프레임 워크 도출
3.1 As-built BIM 기반 방화 객체 공간 모델 생성
3.2 Depth Estimation 기반 BIM 모델 기반 이상치 객체 좌표 추출
3.3 Point cloud-BIM 모델 기반 이상치 객체 좌표 기반 클러스터링
3.4 BIM 기반 공간 모델 생성 방법론
4. 적치물 인식 프레임워크 적용 가능성 분석
4.1 실험 개요
4.2 Point cloud 모델 생성 및 이상치 객체 좌표 추출 실험 결과
4.3 좌표 기반 클러스터링 결과
4.4 원점 기반 BIM 모델 연동 결과
5. 사례 적용 및 분석
5.1 사례 프로젝트 개요
5.2 Point cloud 데이터 생성 및 이상치 객체 추출 검증
5.3 Depth Estimation 기반 모델 클러스터링 및 형상 추출 결과
5.4 BIM 기반 공간구성 모델의 적용 가능성 평가
6. 결 론
1. 서 론
1.1 연구의 배경 및 목적
최근 건설 산업 발전으로 시설이 점차 대형화, 복합화 되어감에 따라 건물 내 화재 발생 시 재실자의 안전 확보에 대한 중요성이 대두되고 있다(Hwang and Yun, 2012).
화재 발생 시 재실자의 안전에 영향을 미치는 요소는 최초 시공 단계에서 내화 구조의 품질 확보 외에 방화 구획에 대한 운영 및 유지관리 단계에서의 지속적인 관리 및 모니터링이 요구된다.
예를 들어, 불법 적치물은 방화구획 및 피난 구역의 접근성을 방해하며 화재 발생 시 연기 및 화염의 확산을 가속화하는 요인으로 작용한다. 이는 대피 동선에 방해되며, 구조 작업을 어렵게 만들어 인명 피해를 증가시킬 수 있다(Heo et al., 2021).
Delcea et al. (2020)는 현장 장애물이 출구를 막으면 대피 시간이 극적으로 길어질 수 있으며 장애물 수가 늘어날수록 구조 경로에 장애물이 있는 영향이 커진다고 밝혔다. 이때, 화재확산 방지 및 피난/경로 확보를 위해 방화구획 및 방화 시설 출입구에 설치되는 방화문과 방화 셔터가 중요한 역할을 한다(Korea Fire Safety Institute, 2018).
과거 발생한 제천 스포츠센터, 밀양 세종병원, 인천 세일전자 등에서 연이어 발생한 화재 사고는 다수의 인명 피해를 초래하였으며, 건축물의 화재안전기준 전반에 내재된 문제점을 드러냈다. 특히, 제천 스포츠센터 화재의 경우, 비상계단 출입구가 창고로 사용되어 피난 통로의 기능을 하지 못해 열과 연기가 건물 내부로 급속히 확산 되었다.
이러한 사례는 화재 시 방화구획의 기능 저하와 피난 경로 관리부실로 인명 피해로 직결될 수 있음을 보여주며, 건축물의 화재 안전성 확보를 위해 불연・난연 건축자재의 사용, 방화구조 및 방화구획의 설계, 피난로의 확보와 더불어 피난시설 및 소방시설의 적절한 설치와 지속적인 유지・관리가 통합적으로 고려되어야 함을 시사한다.
이에, 국내의 경우 「소방시설 설치 및 관리에 관한 법률(소방시설법)」 제 16조에 의해 피난시설, 방화구획 및 방화 시설의 주위에 물건을 적치하거나 장애물을 설치하는 행위 및 피난시설, 방화구획 및 방화 시설의 용도에 장애를 초래하는 행위를 해서는 안 된다고 규정하고 있다. 또한, 「건축물 관리법」 제22조에 따라 소방시설 대상물에 대한 소방시설의 주기적인 점검을 의무화하고 있다. 해당 규정에 의하면 건축물에 지정된 관리인으로 하여금 점검 의무를 부여하여 자발적으로 소방시설물에 대해 자체점검을 하도록 하고 있다.
그럼에도 불구하고, 현행 소방시설 점검 및 관리 체계는 여전히 수작업 및 인력 중심으로 수행되고 있다. 이는 CCTV 또는 지속적인 소방시설 순찰을 통한 육안 검사를 기반하기 때문에, 실시간 모니터링 및 효율적인 유지관리에 한계가 존재한다(Jeong et al., 2023).
실제로, 한국소비자원의 조사 결과, 조사 대상 복합 쇼핑 시설 20개소 중 방화 셔터는 4개 소(20%)중 15곳의 하강 지점, 연동제어기는 동일한 4개 소(20%) 중 9대, 방화문은 13개소(65%) 내 설치된 총 1,138개 중 72개(6.3), 옥내소화전은 6개소(30%) 내 33대 중 10대(30.3%) 내 장애물이 적치된 상태로 방치되어 있었다(Korea Consumer Agency, 2023).
하지만, 기존의 건축물 화재와 관련된 연구는 주로 IoT 및 딥러닝을 기반한 화재 발생에 따른 화재 감지, 대피 경로 계획 등 신속한 조치에 초점이 맞춰져 있다.
예를 들어, Cheng et al. (2020)은 딥러닝 알고리즘을 활용해 CCTV 카메라의 실시간 영상을 분석하여 특정 공간 내 인구수를 감지한 후 화재 발생 시 혼잡 상황을 분석해 대피자가 혼잡한 지역을 피할 수 있는 경로 탐색 프레임워크를 제안하였다.
Prabha (2019)는 실내에 설치된 IoT 네트워크와 온도 센서를 결합해 화재 발생 위치를 특정하고 센서 위치별 화재 강도를 스마트 폰을 통해 재실자, 소방서 및 병원에 알림을 전송해 조기 대피 및 진압이 가능한 시스템을 제안하였다.
Ahn et al. (2023)은 화재 감지기의 오경보 한계를 해결하고자 딥러닝 기술을 활용하여 CCTV 영상을 기반한 화재 감지 모델을 제안했다. 해당 모델을 통한 실험 결과, 일반 화재 감지기 대비 화재 감지 시간이 최대 307초 신속한 것으로 나타났다.
한편, 앞서 언급한 바와 같이 건축물 내 방화와 관련된 요소의 유지관리 미흡에 따른 피해가 지속되자 최근 선행적이며 예방적인 유지관리의 필요성이 대두되고 있다.
Sarasu et al. (2024)는 화재 경보 시스템과 IoT를 결합하여 소화전의 수압, 온도, 유량의 작동 조건을 실시간으로 모니터링 하여 고장 유무를 탐지하는 시스템을 제안하였다.
또한, Bae et al. (2025)는 BIM을 통해 화재 관련 구성요소를 추출하고, 각 구성요소에 점검 주기를 입력한 후 모니터링이 요구되는 구성요소를 시각화하여 시설물 관리자로 하여금 화재 관련 요소의 주기적인 관리를 이행토록 하는 시스템을 개발하였다.
이처럼, 건축물 화재 발생에 따른 피해를 방지하기 위해 화재 발생 모니터링 및 대응 연구뿐 아니라 예방적 차원에서의 유지관리 연구가 필수적이다.
하지만, 선행 연구자가 제안하는 IoT 센서 기반 소화 시스템 고장 모니터링 방식은 건축물 내 모든 소화 시설에 설치가 요구되기 때문에 최초 시스템 구축에 많은 비용이 요구된다. 또한, CCTV와 딥러닝을 결합해 건축물 내 적치물을 감지하더라도 해당 적치물이 방화에 지장을 주는 적치물인지에 대한 판단을 위한 추가적인 학습이 요구된다. 나아가, Bae et al. (2025)가 제안한 시스템은 BIM 모델 내 점검 주기 정보에 따른 시설물 유지관리 시각화 모델을 제안한 것에 의의가 있으나, 여전히 모니터링 주체는 인력 중심이며, 지속적인 모니터링이 요구되는 방화 장애물의 모니터링에는 한계가 있다.
즉, 피난 및 방화 시설 내 적치물과 같은 장애물은 화재 발생 시 피난 및 방화에 직접적인 영향을 미침에도 불구하고 이를 모니터링하기 위한 연구는 미흡한 실정이다. 더욱이, 대규모 IoT 및 센서의 설치가 요구되지 않는 간소화된 프로세스에 대한 접근이 요구된다.
따라서 본 연구에서는 CCTV 영상으로부터 이미지를 추출하여 이를 point cloud 데이터로 변환한 후 BIM 모델과 비교하여 건축물 내 방화 장애물의 모니터링이 가능한 경량화된 프레임워크를 제안하고자 한다.
1.2 연구의 범위 및 방법
본 연구는 단일 카메라 기반의 영상 데이터를 활용하여 생성된 point cloud 데이터의 3차원 정보와 BIM 모델을 상호 비교함으로써 피난 및 방화 구역 내 적치물을 탐지하는 프레임워크를 제안한다.
이때, 본 연구에서 제안하는 BIM 모델은 소방시설법 및 건축물 관리법에 의거하여 모니터링이 요구되는 객체만을 선택적으로 추출하고 이를 간소화된 공간 모델로 변환하였다. 이를 통해 높은 상세수준이 요구되지 않으며 동시에 방화 공간 내 적치물 모니터링이 가능한 경량화된 BIM기반 모니터링 프레임워크를 구성하였다.
프레임워크의 주요 구성은 다음과 같다.
먼저, 공간 모델을 생성하기 위해 문 개폐 시 발생하는 회전 반경을 포함한 점유 영역을 고려하여 Dynamo를 활용해 객체의 속성 정보를 자동으로 추출하고, 해당 데이터를 기반으로 개폐 범위를 반영한 방화기구, 소화기구, 대피동선에 대한 Mass 모델을 생성한다. 이는 객체별 속성 정보를 관리하기 위해 각 패밀리 단위로 Mass를 생성한다.
다음으로, CCTV에서 촬영한 다각도 영상으로부터 point cloud를 복원하는 프로세스를 구축하였다. 단일 이미지로부터 깊이 추정 알고리즘을 통해 depth map을 생성 하기 위해 카메라 내부 파라미터를 이용해 3D 포인트로 역투영하여 point cloud를 구성한 후, 정합, 노이즈 제거, 재구성 과정을 통해 3D 형상을 복원하였다.
생성된 point cloud는 BIM 모델과 동일한 좌표계로 정합하였다.
정합 후, point cloud 기반 모델에서의 점군과 BIM 모델과의 거리 오차 값을 계산하였고, 각 점 군의 좌표(x, y, z)와 거리 오차 (distance) 값을 Excel 형식으로 추출하였다.
또한, 동일한 파일에서 생성된 5개의 세트를 활용해 평균 오차 값을 도출해 임곗값을 설정하였다. 설정된 임곗값을 초과하는 점군 데이터를 기반으로 불규칙한 오차 분포와 노이즈를 고려하여 밀도 기반 DBSCAN 알고리즘을 적용해 이상치 군집을 추출하였다.
이후, Axis-Aligned Bounding Box (AABB) 알고리즘을 활용해 각 클러스터에 포함된 점들의 x, y, z 각 축의 경계값을 기반으로 각 클러스터에 대한 Bounding Box를 생성한다. 이는 이상치에 대한 Bounding Box가 생성된 것이며, Revit과의 연동을 위해 이상치 객체에 대한 Mass 모델을 생성한다.
생성된 이상치에 대한 Bounding Box Mass 모델은 BIM 모델과 연계되어 간섭 검토에 사용된다.
한편, BIM 모델 내 방화 시설 및 피난 동선에 대해서는 Dynamo를 활용하여 각 문, 계단 등 방화 시설 및 피난동선 객체의 경로를 반영한 Mass 형태의 Family를 자동 생성하고, 고유 ID를 부여하였다. 동일하게 이상치로 판단된 형상 기반 공간 모델도 BIM 환경 내 Mass로 생성되어 ID가 부여되며, 기준 모델과 정렬된 후 간섭 검토 기능을 통해 자동 비교가 이루어진다.
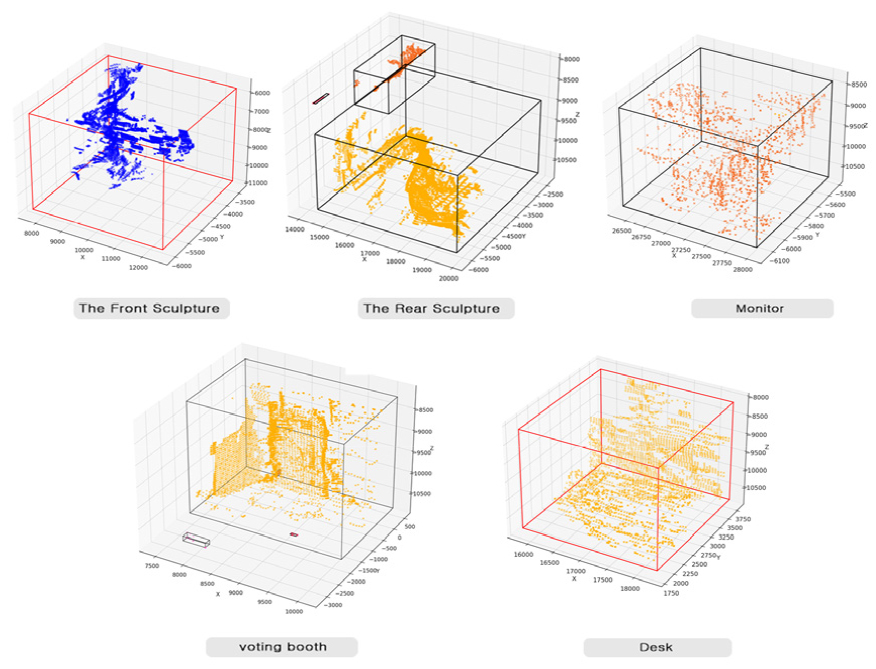
간섭 검토 결과, 수직 피난 동선에 해당하는 계단 앞뒤에 위치한 조형물과 출입구 인근의 투표 부스 등이 이상치로 판단되어 생성된 Mass와 충돌하는 것으로 확인되었으며, 해당 결과는 간섭 검토 보고서 형태로 출력된다. 보고서를 통해 각 이상치 객체가 어느 피난 또는 방화 구역과 충돌하고 있는지 개별적으로 식별 가능하며, 이는 위험 요소의 정량적 진단과 객체 단위 간섭 관리 및 선제적 대응에 활용될 수 있다.
본 연구에서 제안하는 분석 및 시각화 프레임워크는 실제 포인트 클라우드 및 BIM 데이터가 구축된 건축물 사례에 적용되어 그 활용 가능성을 검증하였다. 이에 본 연구는 건축물 유지관리 단계에서의 공간 기반 적치물 인식 여부를 검증하고 유지관리 프레임워크를 제안한다.
2. 이론적 고찰
2.1 건축물 방화 시설 및 제도
건축물이 유지되는 생애주기 동안 건축물을 이용하는 이용자의 안전과 성능 유지를 위해 건축물 유지관리의 중요성이 강조되고 있다(Korea Infrastructure Safety Corporation, 2024).
특히, 건축물 화재 피해는 건축물 소유자 및 관리자 등의 안전 점검 불이행으로 인해 피해 규모가 더 커질 수 있다. 화재로부터 안전성을 확보하기 위해서는 방화구획 및 소방시설의 성능·유지관리 등 종합적 요소가 고려되어야 한다(Korea Fire Safety Institute, 2018).
이에 건축물의 화재 안전법·제도는 「건축법」과 소방 관련 법령으로 이원화되어 시행 중이다(Kim, 2018). 「건축 물관리법」제27조에 따라 관리자는 화재로부터 공공의 안전을 확보하기 위하여 건축물의 화재 안전 성능이 지속적으로 유지되도록 해야 한다.
이에 국토교통부에 따르면 2020년 이후 건축물의 소유자나 관리자는 사용승인일 기준 5년 이내에 최초 점검을 실시하고, 이후 3년마다 화재 안전 점검을 포함한 정기 점검을 수행하도록 규정한다. 또한 「소방시설 설치·유지 및 안전관리에 관한 법률」 제25조 규정에 근거하여 관리인에게 점검 의무를 부여하여 자발적으로 소방시설물에 대해 자체 점검을 하도록 규정하며 제20조에 따라 소방 안전 관리대상물이라면 자격을 갖춘 소방 안전관리자를 선임할 의무를 규정하고 있다.
나아가 「소방시설 설치 및 관리에 관한 법률 시행령」 제4조의3에 따라 방화 시설에는 방화문 및 비상구 등이 포함되며, 본 연구에서는 이를 포함한 방화문, 방화 셔터, 소화기, 소화전, 피난계단, 피난 경로 등을 관련 법령과 BIM 모델 연구를 바탕으로 정의하고, 주요 모델링 대상으로 하였다. 또한, 「소방시설 설치 및 관리에 관한 법률(소방시설법)」 제16조 2항에 따라 피난시설, 방화구획 및 방화 시설의 주위에 물건을 쌓아두거나 장애물을 설치하는 행위 및 피난 시설, 방화구획 및 방화 시설의 용도에 장애를 주거나 화재, 재난·재해 그 밖의 위급한 상황이 발생한 경우 소방 활동에 지장을 주는 행위를 금지하고 있다.
그러나 국회입법조사처는 서울시 내 비법정 안전관리 대상 건축물을 대상으로 실시된 안전관리 실태 조사에 따르면, 다수의 지하층에서 피난구, 피난계단, 방화구획 등 주요 피난 및 방화 요소의 성능이 제대로 유지·관리되지 않고 있는 것으로 나타났다. 특히 일부 지하공간에서는 피난계단이 창고 용도로 변경되어 사용되고 있는 사례도 확인되어, 비상시 피난 경로 확보에 심각한 장애가 될 수 있다고 밝혔다(Kim, 2018).
또한, 건축물의 정기적인 유지관리 점검을 보다 체계적으로 수행할 수 있도록 「건축물 정기점검 매뉴얼」이 마련되어 배포되었으나, 실제 점검 현장에서는 해당 매뉴얼에 대한 이해도가 낮아 「건축법」에 따른 점검 항목의 판단이나 구체적인 점검 방식이 제대로 이행되지 않는 사례가 지속적으로 발생하고 있다. 이로 인해 점검의 신뢰성과 일관성에 한계가 있는 것으로 나타났다(Authority of Land & Infrastructure Safety, 2024).
2.2 현행 방화 시설 모니터링 접근방식
앞서 언급한 바와 같이, 기존의 건축물 피난 및 방화와 관련된 연구는 주로 IoT 및 딥러닝 모델을 통한 신속한 화재 감지 및 대피 경로 계획 등 화재 발생에 따른 대처에 초점이 맞춰져 있다.
하지만, 방화 시설의 경우 상시 모니터링과 예방적 유지관리가 요구되며, 현행 인력 중심의 점검 체계는 관리자가 다수의 건축물을 수기로 점검하는 데 한계가 있으므로 컴퓨터 비전 활용한 소방시설 상태 점검이 가능한 시스템 도입을 통한 원격 모니터링의 중요성이 증대되고 있다(Jeong et al., 2023).
이러한 요구에 따라 최근 건축물 소방 시설의 예방적 유지관리를 위한 연구의 필요성이 대두되고 있으며, 이는 주로 IoT 센서 기반 접근 방식을 채택하고 있다.
예를 들어, 건축물 내 개별 소화전에 IoT 센서를 설치하여 작동 조건 및 고장 여부를 실시간으로 진단하는 시스템이 대표적이다(Sarasu et al., 2024).
하지만, 이러한 센서 기반 접근 방식은 초기 시스템 구축에 비교적 방대한 비용이 요구되고(Sarasu et al., 2024), 센서의 정확도 및 통신 거리의 제약으로 인한 오류 발생 가능성이 존재한다(Kang et al,, 2018).
이에 CCTV 영상에 딥러닝을 적용하여 지하 공동구 내 소화기 위치 정보를 파악하는 연구도 제안되었으나(Park et al., 2022), 소화 시설물의 이상 유무를 모니터링 하는 연구는 부족한 실정이다.
한편, 최근 BIM을 도입하여 건축물 내 각 소방 시설별 점검 주기에 따른 모니터링 모델을 통해 관리자로 하여금 점검이 요구되는 객체를 시각화하는 프레임워크도 제안되었지만(Bae et al., 2025), 화재 발생에 따른 예방적 차원에서의 관리는 소방 시설물의 주기적 점검뿐 아니라 피난 및 방화 장애물에 대한 상시 모니터링이 요구된다.
따라서 본 연구에서는 CCTV 환경과 유사한 조건에서 촬영된 이미지 데이터를 기반으로 깊이 추정 모델을 통해 Pointcloud 데이터를 확보하고, 이를 BIM 모델과 비교하여 방화구획 내 적치물을 감지하고 모니터링할 수 있는 시스템을 제안하고자 한다.
2.3 BIM 기반 운영 및 유지관리
최근 건축 분야에서 BIM (Building Information Modeling)이 3차원 시각화 기반의 객체지향 모델로 건물로 속성 정보 및 공간 정보를 전 생애주기 동안 관리가 가능하기 때문에 사용자의 목적에 따라 건축물 관리에 활용도 관련한 많은 연구가 증가하는 추세이다(Kim & Hong, 2018). 특히, 국토교통부의 BIM (Building Information Modeling) 시행 지침에 따라 일정 규모 이상의 프로젝트에서는 BIM 적용이 의무화되고 있으나 운영 및 유지관리 단계에서의 BIM 활용은 여전히 수작업 중심으로 진행되고 있다(Lee et al., 2024).
이는 As-built BIM 모델의 높은 복잡도로 인한 정보 과잉 및 누락으로 정보 관리 효율이 낮고, 단계 전환에 따른 정보 손실의 문제로부터 야기되었다(Latiffi et al., 2015). 이에 BIM 기반의 운영 및 유지관리를 위해 장기적 관점에서의 데이터 효율과 상호 운용성을 고려한 간소화된 BIM 모델의 필요성을 언급했다(Abdelkarim et al., 2024).
이에, Yoon (2024)은 운영 및 유지관리 단계에서 BIM을 활용하기 위해 As-built BIM 모델을 공간 정보 모델로 간소화하는 프레임워크를 제안하였다. 이는 운영 및 유지관리 단계에서 사용자에 따라 요구되는 정보만을 선택적으로 추출한 모델로, Mass 형태의 공간 모델을 통해 유지보수 이력을 관리함으로써 관리 주체에 따라 데이터가 통합되지 못하는 한계점을 극복하기 위해 제안되었다.
나아가, Lee et al. (2024) 은 Revit과 Dynamo를 활용하여 Yoon (2024)이 제안한 운영 및 유지관리 단계의 공간 모델 생성의 자동화 프레임워크를 제안하였다. 이는 BIM 모델 내 실 형태에 다른 형상 정보와, 마감 재료와 같은 속성 정보를 연계하여 공간 모델의 생성 자동화가 가능함을 보여주었다.
한편, Kim & Hong (2018) 은 센서, CCTV 데이터를 바탕으로 한 객체 기반의 위치정보를 갖는 공간 객체로, BIM 모델의 층별 데이터 및 상시 가시화를 바탕으로 CCTV, 소방시설 등 POI를 적용해 제어함으로써 직관적인 가시성으로 인해 빠른 대응과 모니터링이 가능하다 밝혔다.
이와 같은 연구들은 효율적인 운영 및 유지관리를 위해 유지관리 대상 건축물의 BIM기반 공간 정보 구축의 필요성을 언급했다.
따라서 본 연구는 건축물의 피난 및 방화 시설의 효율적인 모니터링을 위해 모니터링이 요구되는 소방 시설 및 장애물 적치 금지 구역을 BIM 속성 정보를 기반으로 추출하고, 이를 형상 정보에 의거하여 공간 모델로 생성하고는 프레임워크를 제안하고자 한다. 이를 통해 모니터링이 요구되는 부위만을 선택적으로 생성해 관리하는 간소화된 모니터링 프로세스를 제안하고자 한다.
2.4 Depth Estimation
3D 복원 기술 방식 기존의 stereo camera나 LiDAR 기반의 복수 영상의 기법 및 센서 기반의 기술들은 카메라 또는 센서를 복수로 구성하거나, 레이저를 활용하여 대상과의 거리 정보를 직접 측정하는 원리를 기반으로 한다.
이와 같은 기술들은 정밀한 깊이 정보를 제공하지만, 고가의 장비 비용 및 복잡한 설치 조건을 요구한다.
이러한 한계를 보완하고자 단일 영상만으로 3차원 정보를 추정할 수 있는 소프트웨어 기반의 Depth Estimation 깊이 추정 기술의 적용이 증가하고 있다.
단안 깊이 추정(Depth Estimation)은 단일 RGB 이미지로부터 각 픽셀의 깊이 값을 예측하여 depth map을 생성하는 방식이다. 이는 단일 카메라로 가능하며, 센서 없이도 가능해 가장 경량화된 3D 복원 방식이다.
단안 깊이 추정은 이미지의 각 픽셀에 대해 카메라로부터의 상대적 또는 추정된 절대거리 (z축)을 예측한다. 이러한 깊이 정보는 공간 내 점유 범위와 물리적 간섭 가능성을 정량적으로 분석할 수 있도록 한다.
또한, 단일 이미지만으로 고해상도 픽셀 단위의 깊이 정보를 생성하여 객체의 경계 및 위치를 정밀하게 추정 가능하다(Torralba & Oliva, 2002).
단일 이미지를 활용한 단안 깊이 추정의 과정은 Figure 1과 같다.
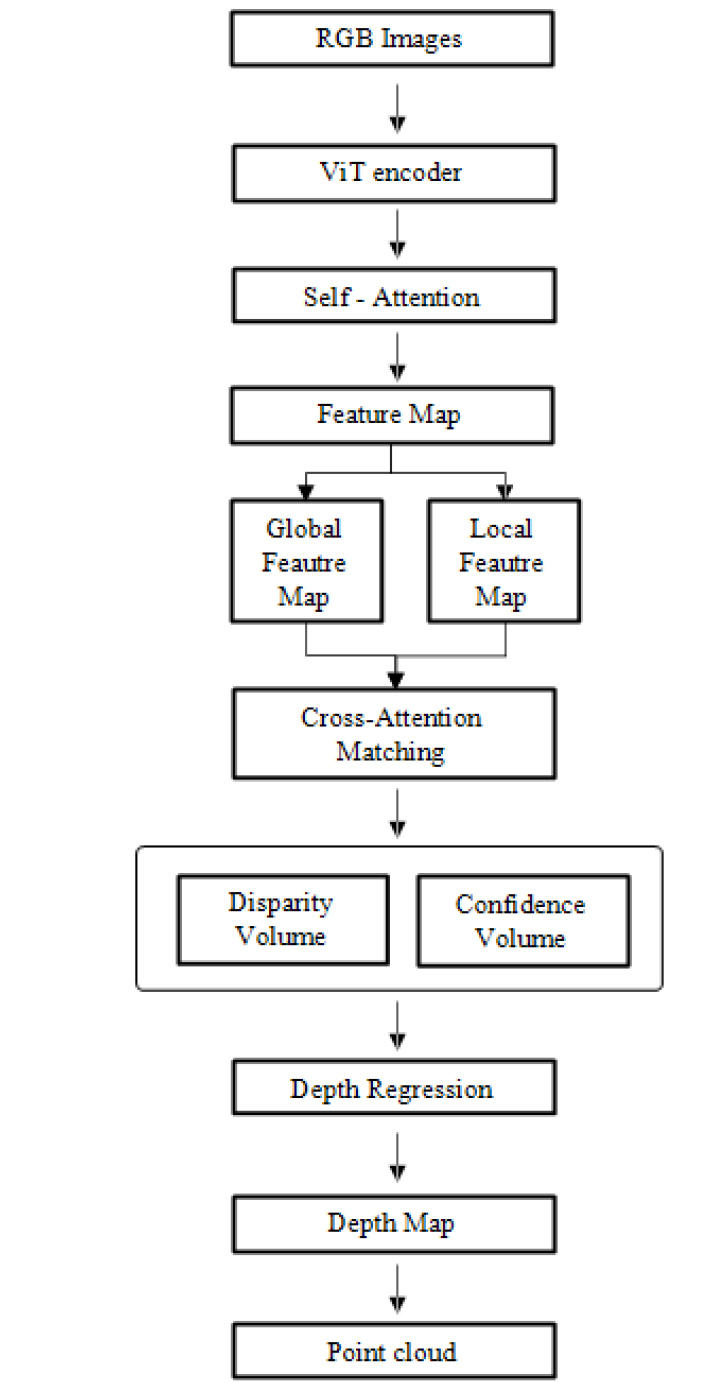
Depth Estimation 깊이 추정 모델은 Encoder-Decoder 구조를 기반으로 하며, 단일 RGB 이미지를 patch 단위로 분할하여 feature를 추출한다(Dosovitskiy et al., 2020).
이후, ViT 기반 encoder를 통해 고차원 feature map으로 변환되며, 이 feature는 각 이미지 내 픽셀이 어떤 공간·의미 정보를 포함한다.
Vision Transformer (ViT)의 인코더에서는 Self-Attention 메커니즘이 작동하여, 이미지 내 패치 간의 상호 작용과 문맥 정보를 효과적으로 학습한다. 이를 통해 보다 구조적으로 일관된 특성 표현이 가능해진다.
이후 Cross-Attention 과정을 통해 서로 다른 시점에서 획득된 이미지 간의 대응 관계가 정밀하게 매칭되며, 이를 바탕으로 disparity와 confidence volume이 형성된다. 이러한 볼륨 정보는 각 픽셀에 대한 깊이 값을 결정짓는 핵심 데이터로 활용되며, 궁극적으로 고해상도 깊이 지도(depth map)의 생성을 가능하게 한다.
생성된 depth map은 카메라의 내부 파라미터를 적용하여 2D 이미지상의 픽셀 좌표를 실제 3차원 공간 좌표로 변환하게 되며, 이 과정을 통해 point cloud가 재구성된다.
이러한 포인트 클라우드 데이터는 객체의 외형 경계 및 표면 형상을 3차원 좌표계(x, y, z) 상에서 직접 표현할 수 있어, 물리적 특성과 실제 공간 점유 영역을 정량적으로 분석하는 데 활용 된다.
또한, 이러한 데이터는 형상 및 경계 정보를 반영하기에 geometry 기반의 클러스터링 알고리즘 적용에 적합하며, 각 포인트에 대한 거리 기반 오차 계산도 가능하다.
따라서 본 연구는 방화구획 CCTV 설치 환경을 가정하여 Depth Estimation 기반 3차원 공간 정보를 복원하고, 이를 통해 장애물에 대한 point cloud 기반 모델과 BIM 모델을 정합하여 포인트 위치와의 거리 오차 값을 통한 객체 변화를 감지하고자 한다. 나아가 이를 활용해 방화 시설을 시각적으로 관리하고, BIM 기반 운영 및 유지관리 체계로 연계하고자 한다.
3. 연구 프레임 워크 도출
본 장에서는 앞서 고찰한 depth estimation 기반 3차원 공간 정보 구축을 바탕으로, 이미지 데이터를 활용한 공간 모델을 생성하고, 장애물에 대한 point cloud 모델과 BIM 모델과의 오차 분석을 수행했다. 이를 통해, BIM 기반 공간정보와 정합된 간섭 검토를 통해 적치물 인식 및 관리를 위한 공간 기반 프레임워크를 도출했다.
다음은 Figure 2은 본 연구에서 도출한 Depth Estimation을 활용한 BIM 공간 모델 기반 적치물 인식 및 관리 프레임워크이다.
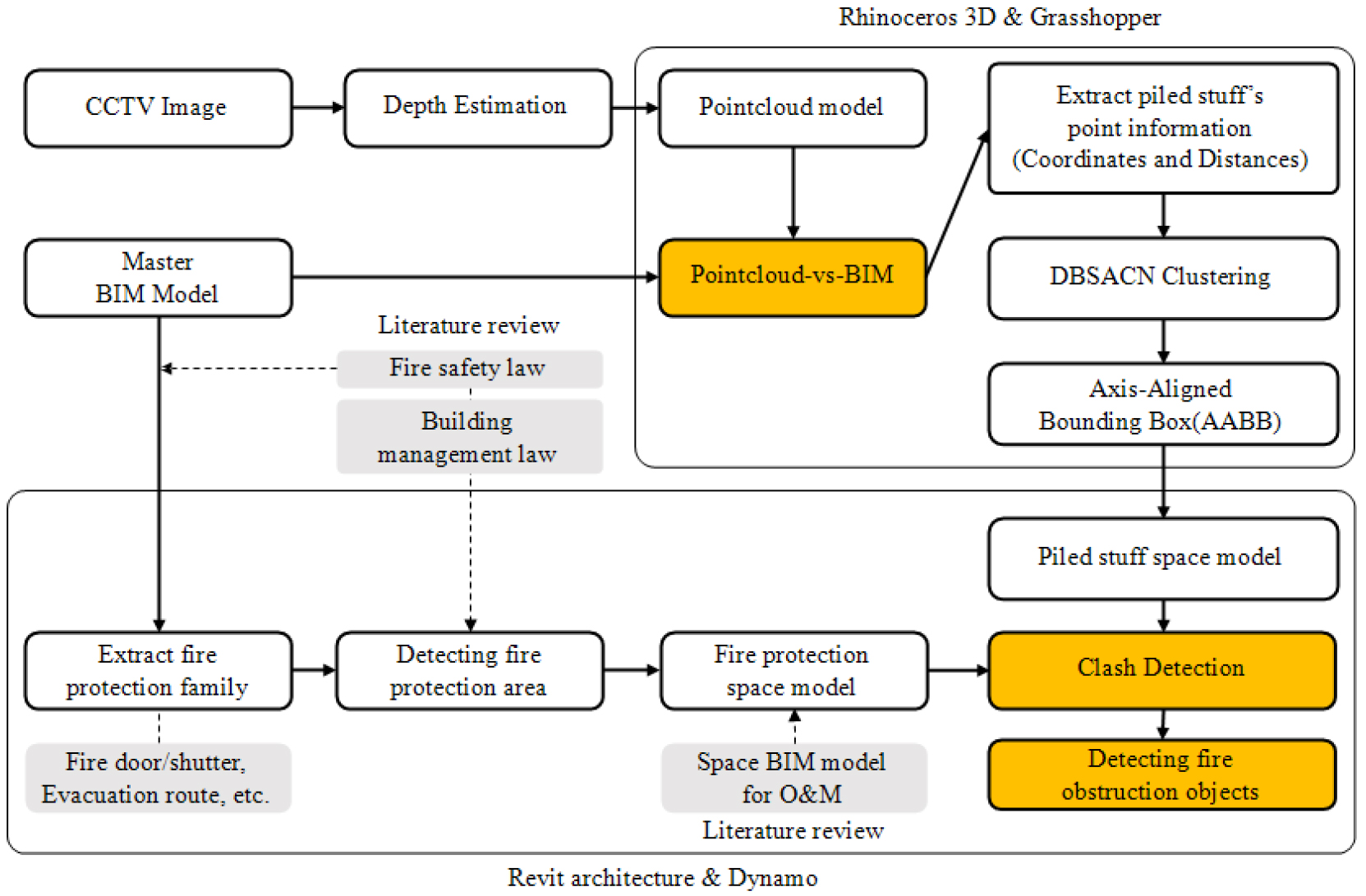
먼저, CCTV 영상을 가정한 다각도 이미지 데이터를 활용한 3차원 공간 모델을 구축하고 장애물에 대한 point cloud 모델로부터의 정점 데이터와 BIM 모델 모델과의 포인트 간의 거리 차이를 도출하였다.
이를 통해, 이상치에 대한 객체를 BIM 모델과 원점 기반으로 정합하여 BIM 기반 공간 모델과 연계해 간섭 검토를 통한 방화 시설 및 피난 동선에서의 장애물 감지를 하였다.
3.1 As-built BIM 기반 방화 객체 공간 모델 생성
BIM 기반 방화 객체의 공간 모델 생성 대상은 앞서 고찰한 소방 관련 법령 및 선행 연구를 바탕으로 정의하였다.
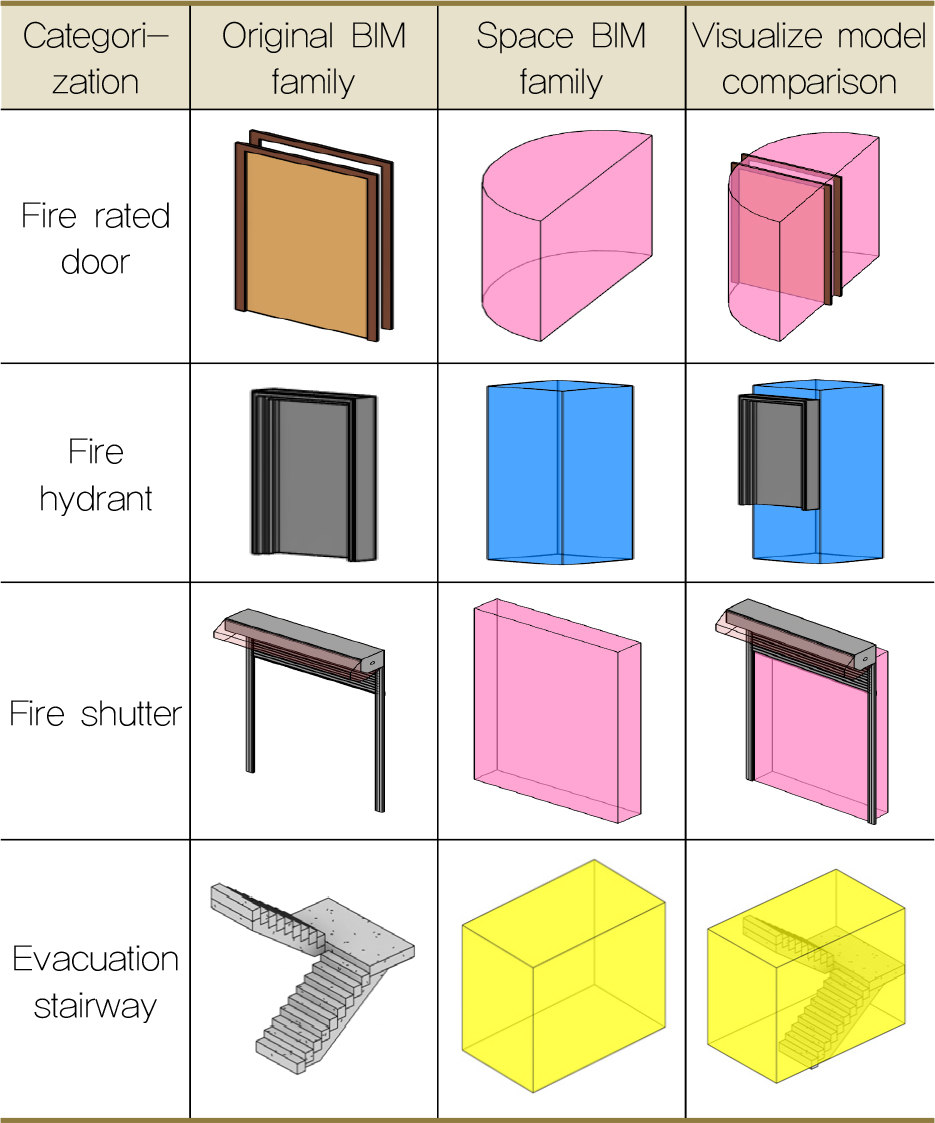
먼저, 본 연구에서 제안하는 방화 공간 모델이란 적치물이 금지된 공간(Space) 또는 영역(Area)을 Mass 모델 패밀리로 전환한 것으로, 단순 객체의 형상뿐 아니라 객체 구동에 따른 유효 공간을 모두 포함한다. 예를 들어, 방화문의 경우 방화문의 개폐에 따른 스윙 유효 공간을 포함하며, 방화 셔터의 경우 셔터 작동에 따른 하부 공간을 포함한다. 또한, 피난계단의 경우 단순 계단뿐 아니라 피난 동선에 해당하는 계단 참을 포함한다.
이때, 방화문, 방화 셔터, 피난계단과 같은 객체는 BIM 모델 내 패밀리로 존재하기 때문에 패밀리 인스턴스 내 정보를 기반으로 방화 객체의 선택적 추출이 가능하다.
또한, 각 패밀리는 정적 상태의 3D 형상 정보와 작동 및 개폐 등 작동에 따른 동적 유효 공간의 2D 정보를 포함하고 있다. 따라서 이러한 정보를 기반하여 Mass 형태의 공간 모델 작성이 가능하며, 방화 객체의 추출 및 공간 모델 생성 과정은 Dynamo 알고리즘을 구축해 자동화하였다.
본 연구에서 구축한 Dynamo 알고리즘의 주요 프로세스는 다음과 같다. 먼저, BIM 프로젝트 내에 있는 모든 객체 패밀리 객체 중 인스턴스 매개변수를 통해 방화와 관련된 패밀리를 추출한다.
이후, 각 패밀리의 형상을 기반하여 요구되는 적치 금지 공간을 Mass 형태의 공간 모델로 변환한다.
예를 들어, 문 객체(방화문, 소화전 등)는 각 패밀리의2D 주석 중 문 스윙에 해당하는 선을 Mass의 경계로 하여 특정 높이를 가진 Mass 형태의 방화 공간 패밀리로 변환한다. 이때, 각 방화 공간 패밀리의 높이는 호스트 문 객체의 상단을 Mass의 상단으로 하고, 호스트 문 객체가 구속되어 있는 레벨을 하단으로 한다. 이는 소화전과 같이 씰 높이가 바닥 마감 레벨에서 일정 높이 이상 이격되어 있는 경우에도 해당 객체 앞에 적치된 적치물을 모두 탐지하기 위함이다.
또한, 피난계단의 경우 층 단위로 계단을 분할하고, 각 층별 계단을 모두 내포하는 Mass 형태의 방화 공간 패밀리를 생성하였다.
다음으로, 피난 동선의 경우 BIM 모델 내 피난 동선에 해당하는 2D 선 기반 패밀리를 입력하고, 각 건축물의 용도에 따른 법정 복도 폭을 입력하면 해당 패밀리를 중심선으로 하는 Mass 형태의 방화 공간 패밀리가 생성되도록 하였다.
이를 통해 본 연구에서는 BIM 모델 내에 모니터링이 요구되는 방화 공간만을 Mass 형태로 간소화시키는 자동화 프로세스를 고안했으며, 이후 이를 3D로 변환된 적치물 모델과 간섭 검토를 통한 간소화된 모니터링 시스템을 제안하고자 한다.
3.2 Depth Estimation 기반 BIM 모델 기반 이상치 객체 좌표 추출
먼저, 단일 카메라에서 촬영된 영상을 활용해 여러 개의 이미지를 추출하여 이미지를 학습하여 3D 공간을 유추할 수 있도록 다각도의 데이터를 확보한다.
연속적인 3D 공간 모델링을 위해서는 이미지의 각 픽셀에 대한 깊이 추정(Depth Estimation) 기법을 적용하여 연속적인 3D 공간 모델을 생성한다.
이는 단일 카메라에서 촬영된 프레임들을 활용하여 여러 개의 이미지 데이터를 추출한 뒤, 각 장면에 대한 깊이 정보를 추정한다. 깊이 추정은 단일 카메라에서 촬영된 다중 프레임 간의 시차를 분석하여 각 픽셀의 거리 정보를 추정하는 방식으로 이루어진다. 이때 생성된 Depth Map은 point cloud 형태로 변환되어, 3차원 데이터로 저장된다.
다음으로, point cloud 기반 모델과 BIM 모델은 서로 다른 좌표를 가지고 있어 Rhino 환경에서 원점 기반으로 정합한다. 이후 Rhino의 VPL (Visual programming language)인 Grasshopper를 활용해 BIM 모델을 기준으로 point cloud 모델의 부위별 좌푯값을 추출한다.
이때, point cloud 모델의 부위별 점 데이터를 점 좌표(x, y, z)와 BIM 모델로부터 이격된 거리(Distance) 값으로 추출한다. 이때, BIM 모델로부터 이격된 거리가 특정 값 이상인 경우 이상치로서 적치물로 판단한다.
이상치에 대한 판단 기준은 4장 내 실험을 통해 point cloud 생성 과정에서 발생하는 오차 범위보다 큰 값으로 설정하였다.
3.3 Point cloud-BIM 모델 기반 이상치 객체 좌표 기반 클러스터링
다음으로 군집화를 진행하기 위한 임곗값을 도출한다.
point cloud와 BIM 모델의 정합 과정에서 깊이 추정, 좌표계 정렬로 인한 오차가 발생한다. 이러한 오차는 클러스터링 과정에서 이상치로 잘못 인식될 수 있는 노이즈로 인식될 가능성이 있다. 이에 군집화를 위한 임곗값을 설정한다.
따라서, 본 연구에서는 군집화를 위한 임곗값을 설정하기 위해, 동일 조건에서 촬영에 대한 point cloud 모델을 BIM 모델과 정합한 후 5개의 세트로 구성하여 각 데이터 세트에 대해 평균 오차값을 산출한 후, 이를 기반으로 전체 평균 오차를 도출하였으며, 해당 값을 기준으로 임곗값을 설정하였다.
설정한 임곗값을 기준으로 초과한 점군에 대해 클러스터링을 적용한다.
이때, 오차 점이 불규칙하고 복잡한 형태로 분포하고 있으며, 노이즈를 포함하고 있다는 점을 고려하여 Density-Based Spatial Clustering (DBSCAN) 알고리즘을 사용하였다. DBSCAN은 밀도 차이를 기반으로 비지도 학습 기반의 군집화 기법이다. DBSCAN 알고리즘을 사용하기 위해 파라미터 Epsilon (eps) 와 min_samples의 설정값을 설정한다. eps는 공간적 밀도 범위를 결정하며, 너무 작으면 과소 군집화가 발생하고, 너무 크면 과대 군집화로 이어진다.
min_samples는 특정 점이 클러스터의 핵심점으로 분류되기 위해 요구되는 최소 밀도 기준으로, 밀도가 부족한 점군의 노이즈 여부를 판별하는 기준으로 작용하며, 민감도에 직접적인 영향을 미친다. 예를 들어, min_samples = 3 이하일 경우, 과도한 클러스터 수와 노이즈 포함 위험이 증가하고, min_samples ≥ 6~10인 경우 클러스터 형성 감소, 상당수의 포인트는 노이즈 처리된다.
본 연구는 적치물(장애물)을 감지하기 때문에 5개 이상의 포인트가 일정 반경 내에 밀집되는 특성을 고려하여 min_ samples=5로 설정하였다. 이는 과도한 클러스터링과 노이즈 오인을 방지하면서도, 소규모 구조물에 해당하는 점군을 효과적으로 탐지할 수 있다.
Rhino는 .obj, .ply, .ifc 등 다양한 3D 형식의 파일을 지원하여 포인트 클라우드 기반 모델과 BIM 모델 간의 데이터 연동이 용이 하기 때문에 본 연구에서는 Rhino를 주요 분석 도구로 활용하였다.
클러스터링은 Rhino 내 노드 기반 비주얼 프로그래밍인 Grasshopper를 통해 수행되었다.
Grasshopper는 반복적이고 대용량의 연산 처리, DBSCAN 알고리즘 적용, AABB 기반 분석 자동화에 적합하며, 클러스터별 점군 추출 및 형상 경계 정보를 산출한다.
이에, 기준 모델과 오차 점군과의 거리 계산을 수행하고 각 클러스터별로 군집 데이터를 추출하였다.
다음으로, DBSCAN을 수행하여 군집 데이터를 추출하며 군집화된 각 오차 점군에 대해 Axis-Aligned Bounding Box (AABB) 알고리즘을 통해 점군의 최솟값과 최댓값을 기반으로 추출된 범위를 기준으로 Bounding Box를 생성하였으며 해당 데이터를 기반으로 이상치 영역을 추출하였다. 이를 기반으로 적치물에 대한 Mass 형태의 3D 모델을 생성한다.
3.4 BIM 기반 공간 모델 생성 방법론
3.3절을 통해 이상치로 도출된 적치물의 3D Mass 모델은 BIM 모델과 원점 기반으로 연동되어 BIM 모델 내에 삽입된다. 이때, 본 연구는 간섭 검토 기능을 통해 방화에 지장이 있는 방화 공간 모델을 식별하는 데 목적이 있으므로 특정 시점에서 추출된 모든 적치물의 3D Mass 모델은 단일 패밀리 객체로 삽입된다.
삽입된 모델은 3.1절에서 변환된 방화 공간 모델과 간섭 검토 기능을 통해 방화에 지장이 있는 부위를 식별한다. 즉, 간섭이 발생한 방화 공간 모델은 방화에 요구되는 영역 또는 공간 내에 적치물이 존재하는 것으로 판단할 수 있다.
이를 통해 BIM 환경 내에서 방화 구역의 적치물 존재 유무를 모니터링할 수 있으며, 각 방화 공간 모델은 개별적인 층/실 정보와 고유 ID 데이터를 가지고 있으므로 프로젝트 내 모든 방화 모니터링이 요구되는 객체의 일괄적인 관리가 가능하다.
4. 적치물 인식 프레임워크 적용 가능성 분석
4.1 실험 개요
본 장에서는 H 대학교 내 계단실을 대상으로 하여, 본 연구에서 도출한 프레임워크의 적용성을 분석하였다.
실험은 단일 고정형 카메라를 활용하여 실제 CCTV 환경과 유사한 조건에서 진행되었으며, 촬영 환경은 화재 시 주요 피난 경로이며 구조가 단순하여 변수 제어가 용이하기 때문에 바닥 면적 19 ㎡, 층고 3.6 m인 계단실 실내 환경을 대상으로 한다.
본 실험은 실험에는 각각 22×19×9 cm, 41×31×28 cm, 10x10x10 cm 크기의 박스를 사용하였으며, 이는 인식 가능한 최소 공간 객체 크기의 한계를 검증하기 위한 기준 물체로 설정되었다.
먼저, 피난계단을 대상으로 CCTV 환경과 유사한 조건으로 하였으며, 출입구를 중심으로 3개 포인트를 배치하였다.
촬영된 이미지는 CCTV 시점에서 3차원 모델링 생성 가능성을 확인하는 데 활용되었다.
3차원 공간 정보를 구축하기 위해, CCTV에서의 다각도의 이미지를 활용해 깊이 추정 알고리즘을 적용하여, 각 픽셀의 거릿값을 계산하여 포인트 클라우드 데이터를 생성할 수 있으며, 이를 기반으로 3차원 공간 모델을 구축하였다.
이후 BIM 모델과 point cloud 모델은 두 데이터를 Rhino 환경 내에서 모델을 정합하여 두 데이터를 BIM 모델 내 원점을 기반한 동일한 기준 좌표계로 통합하였다.
다음으로, Rhino-Grasshopper를 활용해 point cloud 모델에서 point 들을 기반으로 BIM 모델과 오차 거리를 계산하였다.
4.2 Point cloud 모델 생성 및 이상치 객체 좌표 추출 실험 결과
이상치에 대한 point cloud 모델로부터 추출한 각 정점과 BIM 모델 간의 거리를 기반으로 오차를 추출하였다.
두 모델 간의 공간적 차이를 정량적으로 평가하기 위해 x, y, z, 좌표와 해당 점의 거리(Distance) 값을 계산하여 엑셀로 추출하였다.
이때, 군집화를 위한 임곗값은 동일한 데이터로 구성한 각각의 5개 세트의 오차 거리 평균을 산출하고, 이를 기반으로 전체 평균 오차인 평균값(52 mm)을 클러스터링 임곗값으로 설정하였다. 이 평균값은 정합 과정에서의 일반적인 오차 범위를 기준으로 하며, 이를 초과하는 점들을 이상치로 필터링하여 노이즈는 제거하고 이상치에 대한 객체를 정밀하게 식별할 수 있도록 한다.
앞서 생성된 데이터를 기반으로 일정 밀도 이상을 가진 데이터를 기준으로 군집하기 위해 DBSCAN 알고리즘을 사용하였다. 이를 수행하기 위해 3D 좌표 데이터(x, y, z)를 추출하고, Distance (거리 오차) 값을 포함한 데이터 세트를 활용하였다. 비지정 클러스터를 위해 거리 오차 값 52mm를 기준으로 데이터를 필터링하여 선별된 오차 점군을 대상으로 DBSCAN 알고리즘을 적용한다. 이후 오차 점들이 여러 개의 클러스터로 구분되며 군집화되지 못한 점은 노이즈로 처리되어 Bounding Box 생성 대상에서 제외한다.
이때, DBSCAN 알고리즘을 사용하기 위해 eps와 min_ samples의 설정값을 설정한다.
먼저, 이상치 객체에 대한 데이터는 point cloud 데이터의 각 점의 평균 최근접 이웃 거리(NN-distance)를 계산한 결과, 평균 이웃 간 거리가 80~90 mm이다. 이는 eps가 100 mm 이상일 경우 상당수 점들이 밀도 기반으로 연결될 수 있음을 의미하여, eps = 100으로 설정하였다.
또한, min_sampels 값을 설정하기 위해 민감도 분석을 통해 min_samples = 5는 과도한 클러스터 분할(≤3)과 클러스터 미형성(≥6~10) 사이에서 노이즈 억제와 클러스터 유지 간의 균형을 확보하는 타당한 설정값으로 확인되었다.
4.3 좌표 기반 클러스터링 결과
본 장에서는 H 대학교 내 계단실을 대상으로 하여, 본 연구에서 도출한 프레임워크의 적용성을 분석하였다.
비지정 클러스터를 통해 형성된 군집 데이터는 아래 그림과 같이 추출되었다.
이때, 각 클러스터에 대해 AABB 알고리즘을 사용해 최소/최댓값을 기반으로 Bounding Box 범위를 산출하고,
해당 범위를 기준으로 Bounding Box를 생성하였다. 이는 이상치에 대한 Bounding Box가 생성된 것이며, 추후 해당 데이터는 BIM으로 연동하여 Mass 형태의 공간 모델로 생성하였다.
실험 결과, Figure 3, 4과 같이 22×19×9 cm, 41×31×28 cm의 박스는 군집화 과정에서 명확하게 인식되어 군집이 형성되었다.
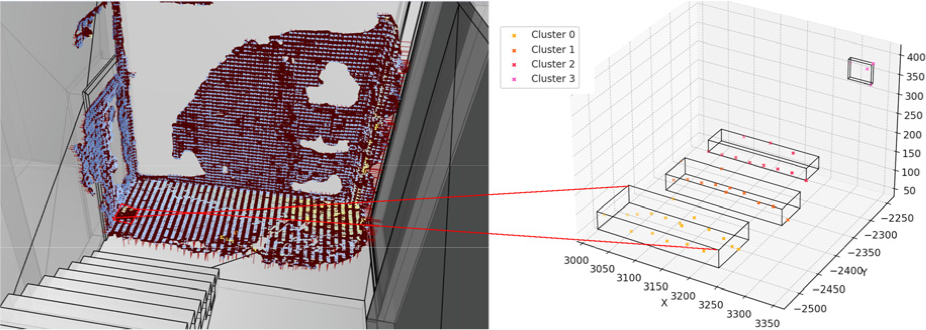
Figure 3에서는 상자 22×19×9 cm 기준 3D BIM 모델과 거리 오차를 계산 및 시각화한 결과이다. 오른쪽은 왼쪽에서 추출된 이상치 점군에 대해 DBSCAN 클러스터링 수행하고, 각 클러스터에 대해 AABB를 산출하여 각 클러스터별 점군 분포에 따라 군집화 및 Bounding Box를 도출한 결과이다.
Figure 4는 상자 41×31×28 cm에 대한 실험 결과이다.
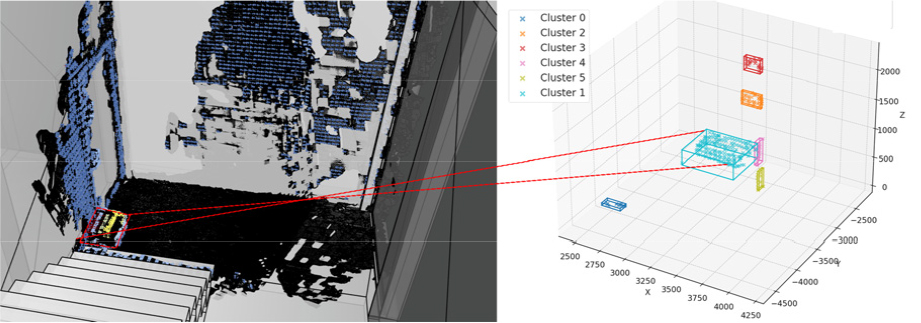
왼쪽 그림과 같이 객체의 윤곽 및 위치가 정밀하게 식별이 가능하였다.
하지만, 10 cm의 정사각형 박스는 점 밀도가 낮고 경계가 불분명하여 군집화 과정에서 유효한 클러스터로 분류되지 못하였다.
이후 클러스터링 결과 중 뚜렷하게 형성된 군집에 한정해 Bounding Box를 생성하여 적치물에 대한 3D 모델을 도출하였다.
이를 통해 비정형 데이터로부터 공간 정보를 구축하며 이상 요소의 위치와 형태를 정량적으로 분석할 수 있는 기반을 제공 가능할 것으로 사료 된다.
4.4 원점 기반 BIM 모델 연동 결과
먼저, 실험에 투입된 피난계단실의 BIM 모델 내에 존재하는 방화 객체는 방화문, 피난계단으로 나타났다. 이를 앞서 구축한 Dynamo 알고리즘을 통해 Mass 형태의 방화 공간 모델을 생성하였다.
다음으로, 이상치에 대한 3D 모델을 원점을 기반으로 BIM 모델에 삽입하였다.
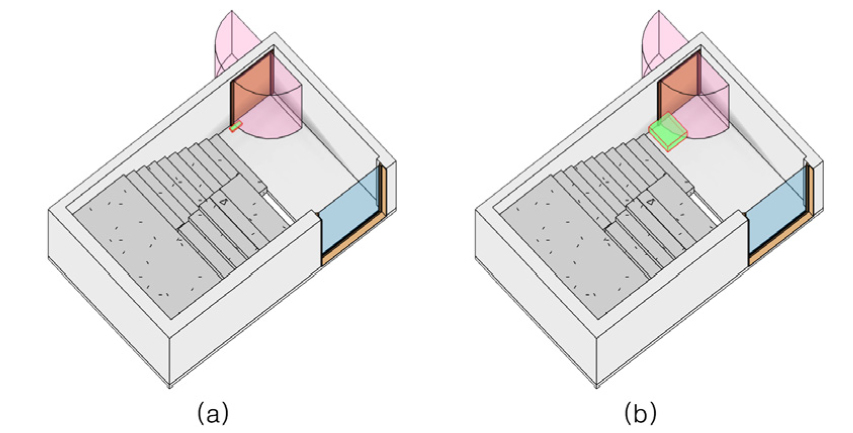
이후, BIM 모델 환경 내에서 통합된 방화 공간 모델과 적치물의 3D 모델을 간섭 검토 기능에 입력하였고, Figure 5 같이 탐지된 모든 적치물과 방화 공간 모델의 간섭이 확인되었다. (a)는 상자 22×19×9 cm의 mass 모델과 Space BIM Family와 간섭 결과이며, (b)는 상자 41×31×28 cm에 대한 시각화 결과이다.
이를 통해 이 실험을 통해 제안한 프레임워크의 적용 가능성을 확인하였으며, 3차원 공간 정보 기반 이상치 탐지 및 간섭 검토 자동화에 활용 가능성을 확인하였다.
5. 사례 적용 및 분석
5.1 사례 프로젝트 개요
본 장에서는 앞서 진행된 실험의 검증 범위를 확대하여 본 연구에서 제안하는 프레임워크를 비교적 대규모 공간으로 확장한 추가 검증을 진행하였다.
사례 적용은 H 대학교의 건축관 내 특정 층을 대상으로 수행되었으며, 해당 층의 면적은 284 ㎡, 층고는 3.6 m로 나타났다.
또한, 단일 층 전체를 대상으로 CCTV 설치 환경과 유사한 조건으로 하였으며, 주요 동선 및 출입구, 계단실 등 중요한 지점을 중심으로 8개 포인트를 배치하였다.
5.2 Point cloud 데이터 생성 및 이상치 객체 추출 검증
본 절에서는 앞서 구축한 프레임워크를 기반으로 대상지를 확장하여 적용함으로써, 본 연구에서 제안한 방법론의 적용 가능성을 검증하였다.
프레임워크 검증의 주요 과정은 아래와 같다.
먼저, 단일 카메라에서 촬영된 영상을 활용해 여러 개의 이미지를 추출하여 3D 공간 모델을 생성한다.
이때, 생성된 Depth Map은 point cloud 형태로 추출된다. 이때, 적치물로 판단되는 이상치 객체로는 테이블, 계단 전·후방의 조형물 2개, 그리고 출입구 인근의 투표 부스가 point cloud 기반 분석을 통해 감지되었다.
생성된 point cloud 기반 모델과 BIM 모델은 서로 다른 좌표계를 가지기 때문에 정합 과정을 통해 동일 좌표계로 Rhino 환경에서 정렬하였다.
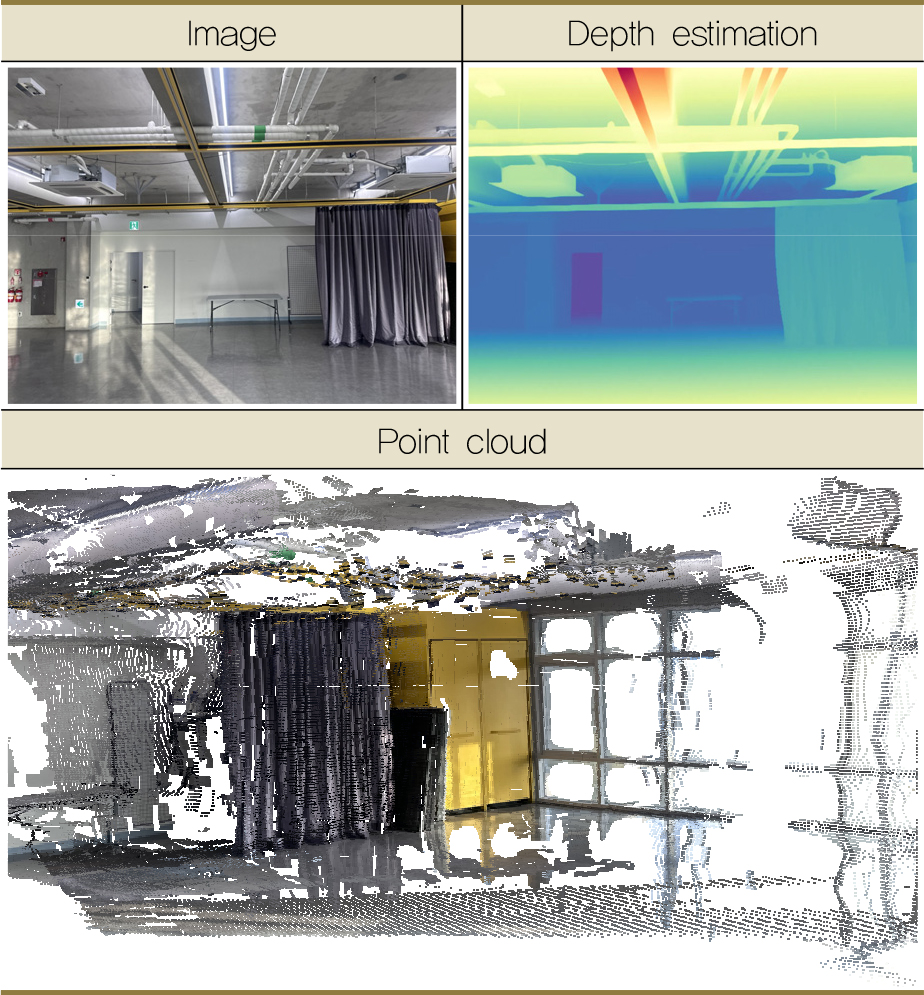
Figure 6는 단일 RGB 이미지를 기반으로 Depth Estimation을 적용하여 3차원 point cloud를 재구성한 결과를 나타낸 것이다.
5.3 Depth Estimation 기반 모델 클러스터링 및 형상 추출 결과
각 이상치에 대해 point cloud 모델과 기준 모델 간의 거리 오차값을 계산하였으며, Grasshopper를 사용하여 x, y, z, distance 값을 추출하였다.
다음으로 추출한 엑셀 형식으로 추출되었으며, 앞서 산정한 임곗값(52 mm)을 초과하는 점들을 이상치로 간주하여 DBSCAN 알고리즘을 활용한 군집화를 진행하였다.
앞서 인식된 각 이상치 객체들의 클러스터링을 진행 후 AABB 알고리즘을 적용해 이상치에 대한 Bounding Box 범위를 추출하여 생성하였다.
먼저, Figure 7 는 이상치로 식별된 point cloud와 기준 모델과의 이격 거리 계산 결과를 나타낸다. 이때, 시각화를 위해 Grasshopper 내 RGB 색상 범례를 통해 이격 거리가 클수록 붉은색으로 표현되도록 부여하였다. 계산 결과, Point cloud 점 데이터 중 기준 BIM 모델과 이격 거리가 큰 부위가 다양하게 식별되었다.
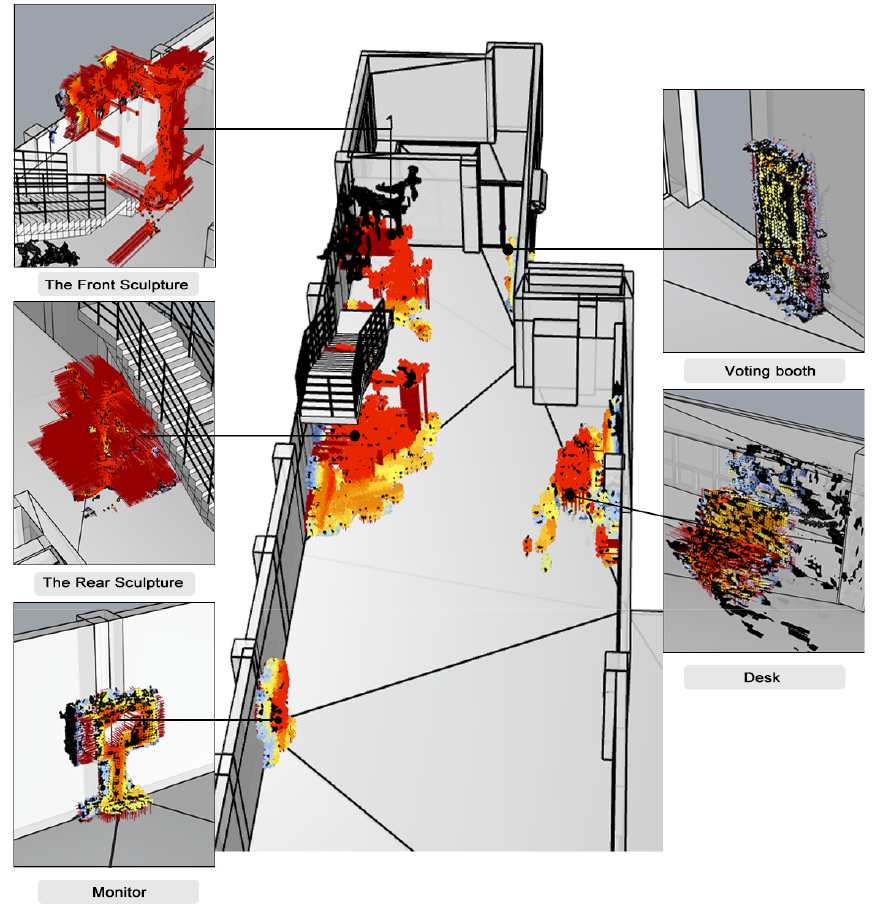
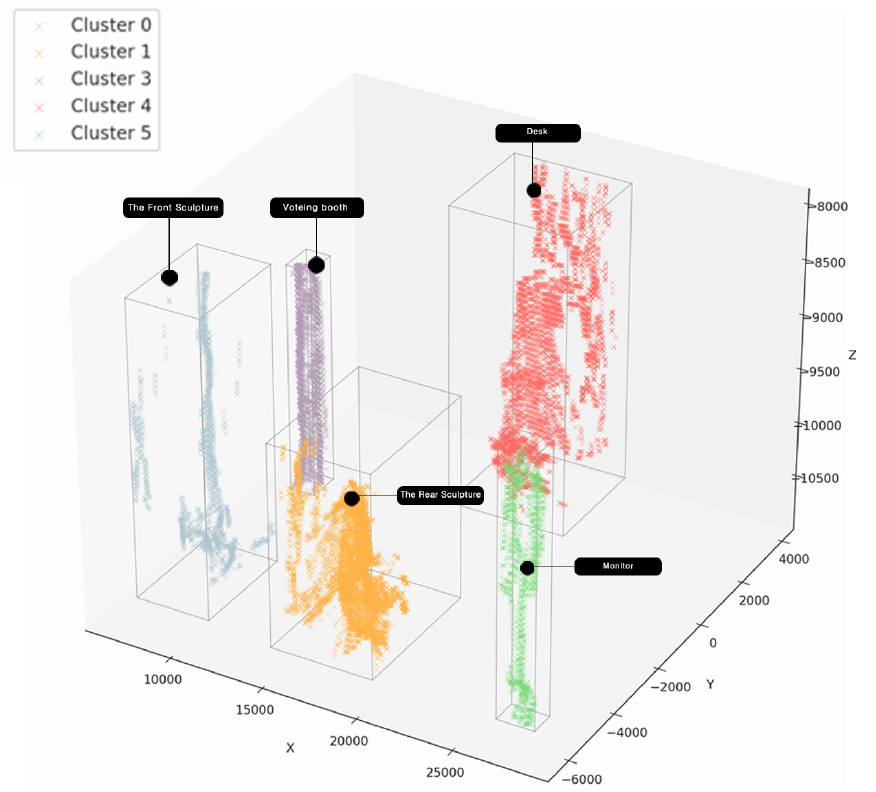
다음으로, Figure 8은 Figure 7에서 감지된 객체 전체에 대해 3장 및 4장을 통해 도출한 기준을 기반으로 Bounding Box와 함께 클러스터링한 결과이다. 그림과 같이 총 5가지의 클러스터가 도출되었으며, 각 클러스터는 모델의 좌표계 내에서 특정 좌표 꼭짓점을 가진 Bounding Box로 도출되었다. Figure 9 은 객체별 cluster 및 Bounding Box 도출한 결과이다.
5.4 BIM 기반 공간구성 모델의 적용 가능성 평가
다음은 사례 프로젝트의 BIM 모델을 기반한 방화 공간 모델 생성 결과 및 적치물 탐지 결과이다.
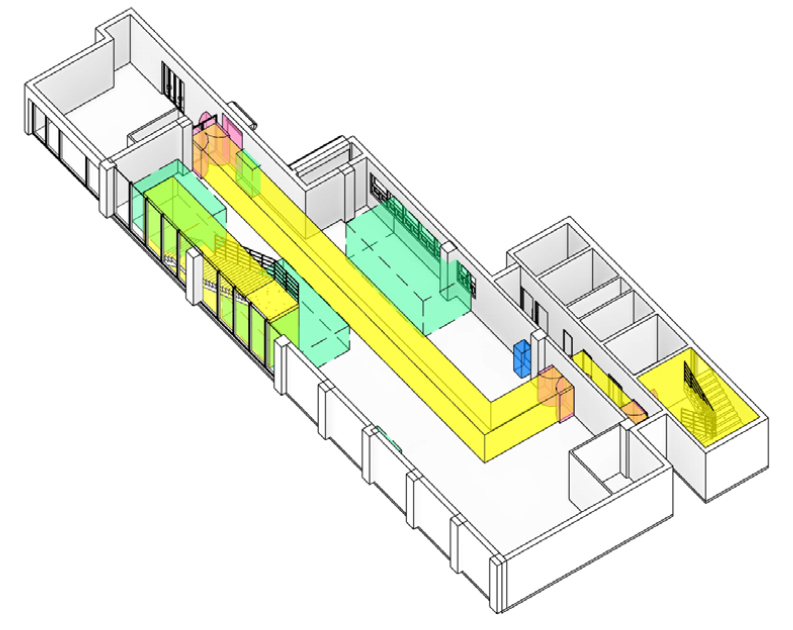
먼저, Figure 10은 사례 적용에 투입된 BIM 모델의 방화 공간 생성 Dynamo 알고리즘 적용 결과이다. 생성 결과, 피난계단 2개소, 피난 동선 1개소, 방화문 3개소, 방화 셔터 1개소, 소화전 1개소가 모두 각각의 ID 데이터를 가진 Mass 형태의 개별적인 공간 패밀리로 생성되었다.
이때, 시각화를 위해 생성된 방화 공간 모델을 소방법에 의거하여 크게 방화 기구(방화문, 방화 셔터), 소화 기구(소화전), 피난 동선(수평 피난 동선, 수직 피난 동선-피난계단)으로 분류하여 그래픽 색상을 입력하였다.
이후, 5.3절을 통해 도출된 적치물 객체를 원점을 기반으로 BIM 모델 환경 내에 적치물 패밀리로 삽입하였다.
Figure 11은 위 과정을 통해 통합한 결과이며, 클러스터링 된 총 4개의 적치물 패밀리가 생성되었다. 방화기구는 빨간색, 소화 기구는 파란색, 피난 동선은 노란색, 적치물은 초록색으로 정의하였다.
다음으로, 방화 공간의 이상 유무를 확인하기 위해 방화 공간 패밀리와 적치물 패밀리간 간섭 검토를 진행하였다. 간섭 검토 결과, 총 4개의 적치물 중 2개의 적치물에서 방화 공간과의 간섭이 도출되었다.
또한, 간섭이 발생한 방화 공간 패밀리는 각각의 ID 데이터가 함께 도출되었으며, Figure 12 및 Figure 13과 같이 BIM 모델 환경 내에서 시각화되었다.
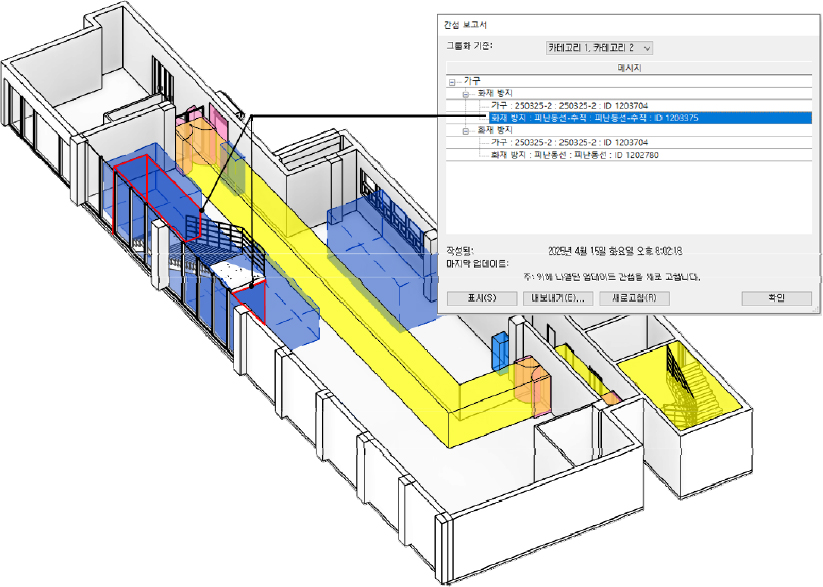
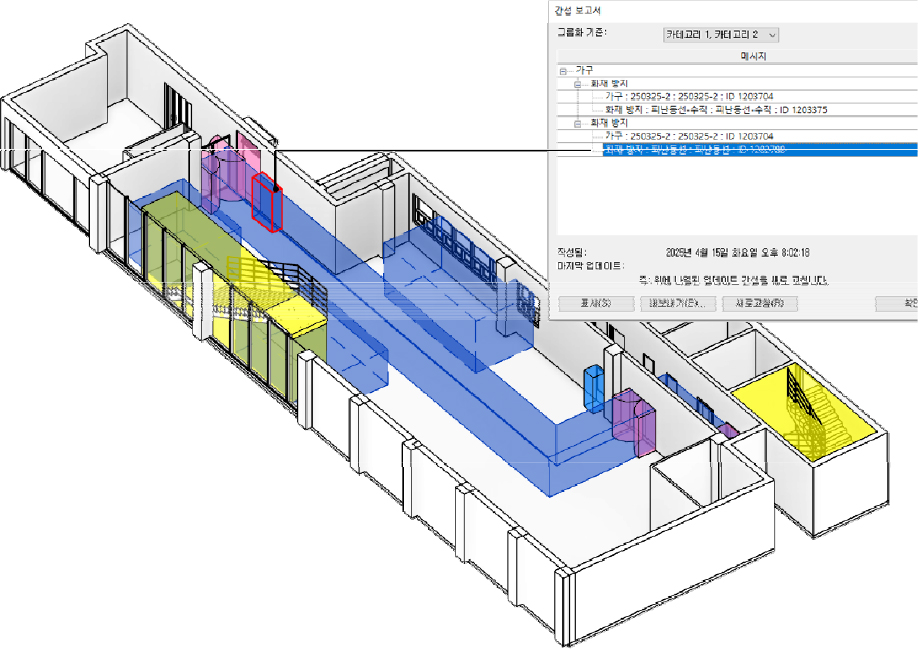
이를 통해 Figure 14와 같이 간섭 결과는 보고서 형태로 생성되었으며, 이를 통해 각 적치물 객체가 어느 방화 공간과 충돌하는지 개별적으로 식별·관리가 가능하였다.
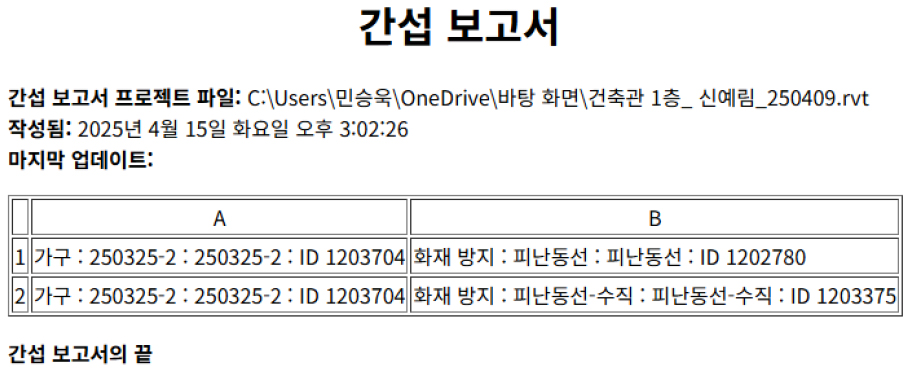
이는 본 연구의 프레임워크를 통해 실내 공간 내 존재하는 적치물 중 방화 구역에 간섭이 있는 적치물만을 선택적으로 식별이 가능하며, 나아가 방화 공간 패밀리에 부여된 ID 데이터를 통해 해당 공간의 정보를 효과적으로 열람 및 관리할 수 있음을 시사한다.
6. 결 론
본 연구에서는 방화 시설물에 대한 모니터링 및 유지관리의 한계점을 도출하고, 이를 개선하기 위해 공간 BIM 모델 기반 피난시설, 방화구획 및 방화 시설 내 적치물 감지 프레임워크를 제안하고 검증하였다.
먼저, 깊이 추정 모델 실험을 통해 22×19×9 cm, 41×31× 28 cm, 10x10x10 cm 규격 객체의 형상이 모두 비교적 정확히 복원되는 것을 확인하였다. 반면, 클러스터링 실험에서는 10x 10x10 cm 규격 객체의 경우 점군 간 경계가 불분명하여 군집 간 구분이 모호해져 클러스터 구조를 형성하지 못하는 것을 확인하였다.
이는 AABB 클러스터링 알고리즘의 한계이자 본 연구에서 제안하는 프레임워크의 한계로 판단된다.
그럼에도 불구하고, 제안한 프레임워크의 적용 가능성 및 사례 프로젝트 적용 결과, 본 연구에서 제안하는 방화 공간 모델 생성 프레임워크를 통해 모니터링이 요구되는 방화 구역에 해당하는 피난계단 2개소, 피난 동선 1개소, 방화문 3개소, 방화 셔터 1개소 소화전 1개소가 모두 공간 모델로 생성되는 것을 확인하였다. 이는 모니터링이 요구되는 공간을 선택적으로 간소화 및 생성하였다는데에 의의가 있다.
또한, 깊이 추정을 기반한 point cloud 모델의 클러스터링 적용 결과, 실제 사례 프로젝트 내에 존재하는 실내 적치물 4개소의 3차원 Mass 형태를 모두 성공적으로 생성하였다. 나아가, 이를 방화 공간 모델과 상호 비교한 결과 총 2개소의 적치물이 방화 공간과 간섭이 존재함을 확인하였고, 방화 공간 모델의 ID 데이터를 통해 피난 및 방화에 장애물이 존재하는 방화시설물을 식별하였다.
본 연구에서는 CCTV와 유사한 환경에서 촬영된 이미지 데이터로부터 도출된 Point cloud 데이터와 BIM 모델을 기반으로 건축물 내 방화 장애물의 모니터링이 가능한 프레임워크를 제안하였다는 데에 의의가 있다.
특히, BIM 모델의 객체 정보를 기반으로 피난 및 방화 구역을 식별하고, 이를 간소화된 방화 공간 모델로 생성하여 방화 장애물 탐지를 가능하게 함으로써, 건축물 유지관리 단계에서의 실시간 방화 공간 위험 요소 모니터링 체계 구축의 가능성을 제시하였다.
나아가, Dynamo를 기반으로 속성 정보 추출 및 Revit과의 통합 프로세스를 통해 객체 식별, ID 부여, Mass 생성 및 간섭 검토까지 전 과정을 자동화함으로써, BIM 기반 유지관리 프로세스의 적용 가능성을 확인하였다.
이는 기존 피난 및 방화와 관련된 연구에서 다뤄지지 않은 접근 방식이며, 경량화된 BIM 공간 모델을 기반함으로써 불필요한 데이터 과부하를 줄이며 동시에 모니터링 요소에 집중된 관리 방안인 것으로 여겨진다.
하지만, 프라이버시 및 데이터 보안의 문제로 실제 건축물 내 CCTV 영상을 기반한 검증이 이루어지지 않아 영상 스트리밍 계산 속도에 따른 실시간성 결과치를 도출하지 못한 것은 연구의 한계이다.
또한, 사례에 적용한 프로젝트는 단층 내 제한된 구역으로 다층 및 대규모 건물로의 확장 적용이 미흡한 것 역시 본 연구의 한계이다.
더욱이, 본 연구에서는 깊이 추정 모델의 조도, 시야각, 피사체와의 거리 등 촬영 파라미터에 따른 적치물 탐지 정확도 및 상세수준을 다루지 않았다.
따라서 추후 본 연구에서 제안한 프레임워크의 기술적 고도화 및 세분화가 요구되며, 나아가 실제 CCTV 프로토타입 시스템에 적용을 통해 실효성에 대한 종합적 논의가 요구된다.
