

1. 서 론
1.1 연구의 배경 및 목적
1.2 연구의 범위 및 방법
2. 건축물 사후관리 및 포인트 클라우드 관련 선행연구 및 기술 분석
2.1 건축물 사후관리 관련 선행연구 분석
2.2 포인트 클라우드 기반 3D 스캐닝 기술 및 선행연구 분석
3. 건축물 표면균열 추출 기준 및 BIM 기반 Mock- up 시나리오 도출
3.1 3D 스캐닝을 통한 표면균열 추출 기준 도출
3.2 파라메트릭 기반 건축물 표면균열 추출 Mock-up 시나리오 도출
4. 포인트 클라우드 기반 표면균열 추출 및 측정 알고리즘 개발
4.1 건축물 표면균열 추출 알고리즘 도출
4.2 포인트 클라우드 기반 표면균열 폭 측정을 통한 알고리즘 검증
5. 결 론
1. 서 론
1.1 연구의 배경 및 목적
건축물의 표면균열은 건축물의 안정성과 직결되는 중요 요인으로, 작은 결함이라 할지라도 중대하자 기준을 초과할 경우 신속한 보수와 관리를 필요로 한다. 이러한 균열은 건축물의 구조적 결함을 시사하거나, 시공 과정상의 문제를 드러낼 뿐만 아니라, 거주자들에게 심리적 불안감과 생활상의 불편을 야기할 수 있다(Hwang et al., 2016). 특히 공동주택은 거주 세대가 많고 면적이 광범위하여, 균열 발생 여부를 놓치지 않고 전수 조사하기가 쉽지 않다. 기존의 방식은 숙련된 검사 인력이 육안을 통해 균열을 발견 및 분류를 해왔으나, 이는 검사자의 경험과 관찰 능력에 크게 의존한다는 한계를 지닌다. 게다가 육안 검사를 하기 위해서는 건물 외벽 접근 장비나 안전장치가 필요하며, 넓은 구역을 다수의 인력이 장시간 조사해야 하는 비효율적인 면이 발생하기도 한다.
이러한 문제점을 극복하기 위해 최근에는 3D 스캐너를 활용하는 접근 방식이 주목받고 있다. 3D 스캐너가 수집하는 포인트 클라우드(Point Cloud) 데이터는 건축물의 표면 정보를 매우 높은 해상도로 디지털화하여, 육안으로 놓칠 수 있는 미세 균열까지도 탐지가 가능하다(Baek, 2019). 포인트 클라우드는 수백만 개에서, 많게는 수억 개의 점으로 이루어진 자료 구조로, 표면의 깊이 및 굴곡 등을 정밀하게 반영한다는 장점이 있다. 이를 통해 기존의 일회성이고 주관적 판단에 의존하던 균열 탐지 방식에서 벗어나, 정량적이고 재현성 있는 균열 검사를 수행할 수 있게 된다. 또한 빛이나 레이저를 활용한 비접촉 측정이라는 특성상, 검사 인력이 직접 외벽에 접근하지 않고도 대규모 영역을 신속하게 스캔할 수 있어 작업 안전성과 효율성 모두를 제고할 수 있다.
한편, 포인트 클라우드로부터 의사결정에 유용한 정보를 추출하기 위해서는 이 데이터에 대한 후처리와 분석이 필수적이다. 특히 최근 건축 분야에서 광범위하게 도입되고 있는 BIM (Building Information Modeling) 기술과 파라메트릭(Parametric) 디자인 도구가 이러한 후처리를 한층 자동화할 수 있다. 예를 들어, BIM 소프트웨어에서 모델링된 건축물 정보와 스캐너가 생성한 포인트 클라우드를 결합하면, 특정 위치의 균열 폭, 깊이, 방향 등 각종 정보를 속성으로써 저장하고 관리할 수 있다(Choi et al., 2020). 더 나아가 파라메트릭 도구는 포인트 클라우드 데이터에서 기하학적 패턴을 분석해 균열 형태를 자동으로 분류하고, 중대하자 기준 폭 이상인 영역을 빠르게 식별하는 알고리즘을 구축하는 데 활용될 수 있다.
최근 들어 인공지능을 활용하여 건축물의 균열을 찾아내고 폭과 깊이 등을 측정하는 모델과 방법론이 많이 연구되고 있다(Lee et al., 2014). 하지만 이러한 방법은 모델과 학습 데이터의 질과 양에 따라 정확도 및 신뢰도 등이 많이 좌지우지되며, 이를 통해 균열을 탐지하거나 분류할 수 있다. 하지만, 이는 단순한 ‘발견’ 단계에서 ‘정량화·분석’ 단계로 고도화할 수 없다.
따라서 본 연구에서는 파라메트릭 도구를 활용하여 건축물 유지관리 측면에서 균열의 폭을 측정하는 방법론을 개발하고 해당 균열이 중대하자인지를 판별하고자 한다. 또한 건축물 균열 관리를 위한 구체적인 기준을 제시하며 특히, 중대하자로 구분되는 주요 균열을 중점적으로 다룸으로써, 실제 현장에서의 적용 가능성을 높이고자 한다. 나아가 본 연구는 단순히 포인트 클라우드를 활용한 알고리즘 및 방법론을 제시하는 것이 아닌 중대하자를 구별하기 위한 포인트 클라우드 획득 기준에 따른 스캐너 사양 등을 도출하여 파라메트릭 기반의 표면균열 탐지 알고리즘 개발하고자 한다.
1.2 연구의 범위 및 방법
건축물 표면에서 발생한 균열 중 중대하자를 구분하는 기준에는 균열의 폭과 깊이, 그리고 형상과 변화의 추이를 고려해야 한다. 본 연구에서는 균열의 폭을 통해 중대하자를 구분하는 알고리즘을 개발하고자 한다. 이는 건축물의 구조적 결함 또는 심각한 하자 분쟁으로 이어질 가능성이 높은 범주이기 때문에, 유지보수와 사후관리 차원에서 우선적으로 모니터링되어야 할 주요 대상이기도 하다. 실제 현장에서는 균열이 건물 외벽이나 실내 마감 면 등에 다양한 형태와 방향, 깊이로 발생하므로, 이를 일일이 전수 조사하기에는 상당한 노력이 소모된다. 따라서 본 연구에서는 이러한 균열들을 폭의 기준에 따라 중대하자를 식별하기 위한 새로운 방법론을 제시하기 위해, Mock-up 테스트를 통한 시뮬레이션 연구를 진행하고자 한다. 또한 여러 균열의 종류 중 정형의 건축물에 발생하는 균열로 범위를 제한하였다.
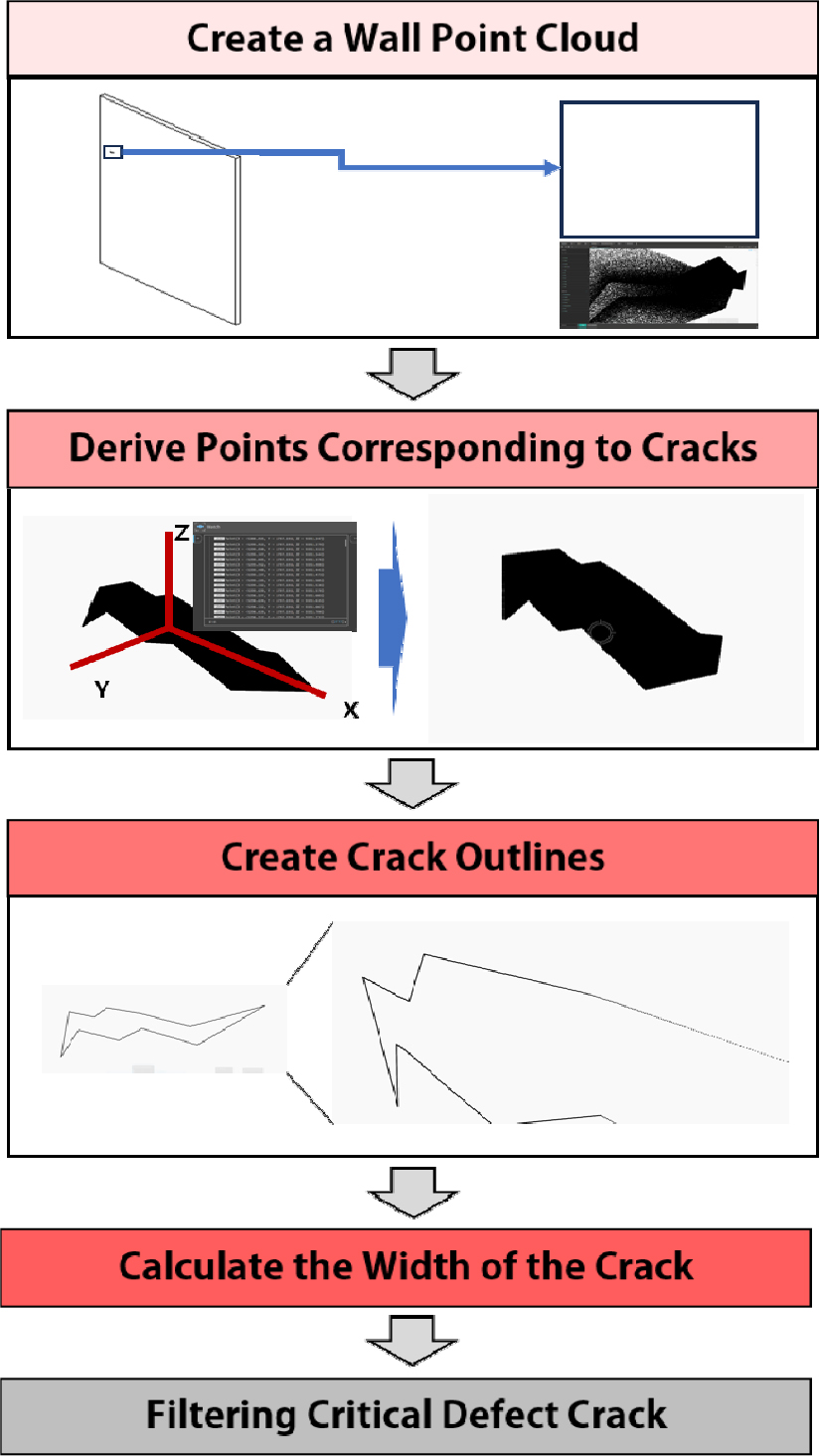
이를 위해 연구를 진행한 절차는 다음 Figure 1과 같다.
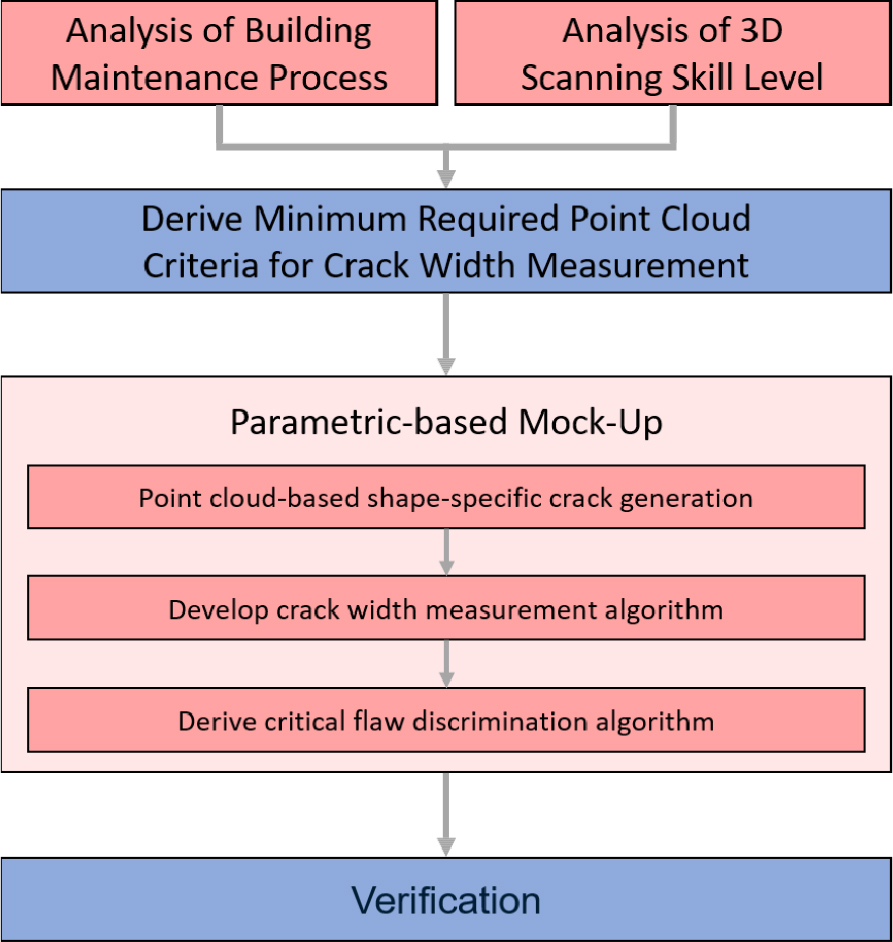
우선 건축물 유지관리를 위한 프로세스와 3D 스캐닝의 최근 기술 및 연구 동향을 분석하여 균열 탐지를 위한 포인트 클라우드의 충족 조건 및 스캐너 사양의 기준을 도출한다. 이를 바탕으로 파라메트릭 기반 Mock-up 테스트를 수행한다.
Mock-up 테스트는 먼저 생성된 대상 벽면에서 균열에 해당하는 포인트 클라우드 데이터를 추출한다. 이를 바탕으로 균열에 해당하는 포인트 사이의 거리를 측정하는 알고리즘을 개발하여 균열의 폭을 측정하여 최대 폭을 도출한다. 도출된 균열 폭을 중대하자 기준을 초과하는지 판별하여 실제 생성된 균열의 폭과 비교하여 개발된 알고리즘을 검증한다.
이처럼 Mock-up 테스트를 기반으로 정립된 탐지 기준과 파라메트릭 알고리즘의 성능 평가는 곧바로 실무 현장에 적용할 수 있는 방법론을 구축하고자 한다. 궁극적으로는 건축물 내외부 벽체에 발생하는 중대하자 균열을 자동 탐지함으로써 시공사·관리주체·거주자 등 모든 이해관계자에게 신뢰도 높은 검사 체계 프로세스를 제공하는 것을 목적으로 연구를 진행하고자 한다. 나아가, 연구 결과가 축적되면 균열 관리 데이터베이스를 구축하거나, 건물 유지관리(FM, Facility Management) 시스템과 연동해 균열 상태 모니터링과 보수 이력을 자동으로 기록 및 갱신할 수 있을 것이다.
2. 건축물 사후관리 및 포인트 클라우드 관련 선행연구 및 기술 분석
2.1 건축물 사후관리 관련 선행연구 분석
우리나라는 해방 이후 70-80년대 급격한 경제성장과 도시화 과정 동안 단기간에 많은 건축물이 지어지고 무분별한 도시계획이 이뤄졌지만, 체계적인 관리 체계 및 방식에 대한 지침 및 가이드라인 개발이 이뤄지지 않았다(Hwang et al., 2016). 이러한 노후건축물에 대한 관리뿐만 아니라 준공된 건축물의 사후관리에 대한 방침 등 또한 미비하다. 현재 국내에서는 공동주택관리법과 건축법 등 관련 법령에 따라 건축물의 균열 및 기타 결함을 확인하기 위한 유지관리 절차가 규정되어 있다. 특히, “건축물 안전점검 지침”에서는 눈으로 균열을 확인하고 폭을 측정하는 전통적인 현장 검사 방식을 취하고 있다. 이는 일정 수준까지의 정확도는 보장할 수 있으나 인력 중심으로 이루어지다 보니 시간·비용 측면에서 비효율적일 뿐 아니라, 검사자의 경험 및 숙련도에 따라 측정 결과에 오차가 발생할 수 있다는 한계가 있다. 더구나 최근 건축물은 고층화되고 외피가 복잡해지는 추세여서, 전통적인 방식으로 전면적·정밀 조사를 수행하기가 점점 더 어려워지고 있다.
대부분의 공동주택 및 일반 건축물에서는 정기·수시 점검 시 ‘균열 폭 측정기(Crack Gauge)’나 육안 관찰 방법을 통해 구조체 및 비구조체의 균열 상태를 기록하는 것이 일반적이다. 구체적으로 우선 육안 검사를 실시하는데, 안전진단 전문가 혹은 점검 담당자가 사다리나 작업대 등을 이용해 외벽 또는 내부 마감 면을 직접 관찰한 뒤, 균열 여부와 대략적인 폭을 기록한다. 이후 단순 계측기를 사용하여 균열의 폭을 측정한다. 이 방법은 크랙 게이지나 크랙 스케일 등을 이용해 균열 폭을 수동으로 측정하여 수치화한다.
이러한 방식은 상대적으로 장비 비용이 저렴하고, 초기 교육만 이뤄지면 비교적 쉽게 적용할 수 있다는 장점이 있다. 그러나 인력 의존도가 매우 높고, 작업자가 고층 외벽을 직접 검사하기 위해 승강장비 또는 로프 접근을 해야 하는 등 안전사고 위험도 크다. 아울러 육안으로 관찰되는 균열 폭의 측정 오차가 발생하기 쉬우며, 균열 위치가 분산되거나 복잡한 형상을 보일 경우, 이들을 전부 체계적으로 기록 및 분석하는 데 한계가 있다는 문제점이 지적되어왔다(Cho et al., 2018).
최근 지어지는 건축물은 초고층 공동주택이나 복합형 외피(Facade)를 갖춘 빌딩이 늘어나면서, 단순 육안 검사를 통한 균열 조사로는 전면적이고도 정확한 유지관리를 수행하기가 더욱 어려워졌다. 외벽 면적이 수만 ㎡ 이상에 달하는 초고층 건축물의 경우, 인력이 일일이 접근하기 위해서는 막대한 시간이 필요하고, 균열 발생 부위를 놓칠 위험도 높아진다. 이처럼 점차 복잡화 및 대형화되는 건축물 구조는 전통적 점검 방식의 신뢰도와 효율성을 한층 더 낮추는 결과를 낳고 있다.
시설물 유지관리를 위해 BIM을 활용한 연구도 진행되었는데, 시설물의 유지관리 시 BIM을 활용하고 운영 방법 및 효과를 도출하기 위해 기존의 유지관리 시나리오와 비교·분석하여 BIM 기반의 유지관리 시나리오를 도출하였다(Kang et al., 2016).
인력 중심으로 진행되는 건축물 균열 검사는, 복합화되는 건물에서 작업 효율과 검사 신뢰도가 급격히 낮아지는 한계를 노출하고 있다. 또한 이러한 인력 중심의 과정은 인명사고 발생 및 점검비용과 시간이 많이 들어간다(Choi et al., 2020). 이러한 한계를 개선하기 위해, 3D 스캐닝 기반 포인트 클라우드를 활용하고 파라메트릭 알고리즘을 결합함으로써, 기존 방식보다 정량적이고 안정적인 균열 탐지 체계를 구축할 수 있다는 점에서 본 연구는 의의를 지닌다.
2.2 포인트 클라우드 기반 3D 스캐닝 기술 및 선행연구 분석
3D 스캐닝은 건축물 표면의 미세 형상을 고해상도로 취득할 수 있는 비접촉식 측정 기술로, 최근 콘크리트 구조물이나 도로 포장 등에 발생하는 균열을 자동으로 진단하기 위한 방법으로 활용되고 있다. 특히 지상 라이다(Terrestrial LiDAR)를 이용해 획득한 포인트 클라우드는 수백만에서 많게는 수억 개의 점 좌표로 구성되어 있어, 육안 검사나 2D 영상만으로는 놓치기 쉬운 극미세 균열까지 분석할 수 있게 한다. 하지만 실제 적용 과정에서의 장비 사양(정확도, 분해능, 스캔 거리)과 대용량 데이터 후처리, 그리고 노이즈(조명·반사) 등의 영향에 따른 문제점이 있다.
국내에서 건물 내부의 3D 스캐닝을 통한 형상 정보를 획득한 연구가 있었다. 획득 과정에서 포인트 데이터 정밀도에 다른 측정 시간과 획득한 데이터 간의 오차를 분석하여 최적의 포인트 데이터 정밀도를 제시하는 연구가 진행되었다(Lee et al., 2014). 리모델링 프로젝트에서 기존 설계 도면이 없어 발생하는 문제를 해결하기 위하여 3D 스캐닝을 통한 3차원 형상 정보를 획득하여 도면화하였다. 하지만, 이 과정에서 역설계 기술의 정확도 및 3D 형상 정보 획득 및 도면 작성 시간에 대한 정보가 부족하므로 실무 도입 시 활용 가능성에 대한 문제가 있다.
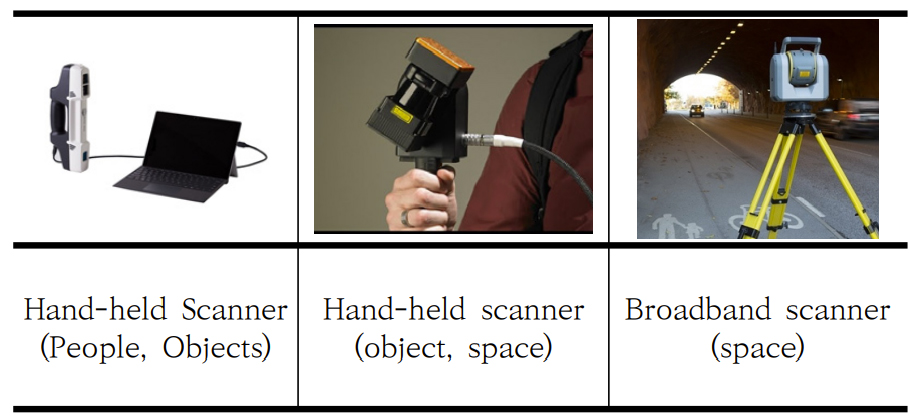
또한 건축 분야에서 3D 스캐닝의 동향과 이를 응용한 기술 및 연구를 분석하고 3D 스캐닝이 건축의 다양한 분야에서 효과적으로 활용되고 있는지에 대한 연구가 진행되었다(Hwang et al., 2021). 본 연구에서는 3D 스캐닝이 건설 당계에서도 필수적인 요소로 활용되어야 한다고 분석하였으며 이후 자동화 로봇을 활용한 확장성에 대해 언급하였다. 다음 Figure 2는 위의 연구에서 분류한 3D 스캐너의 종류이다.
한편 이러한 한계를 극복하고자 무인비행시스템을 통해 얻은 영상 데이터를 Deep Learning 기술을 활용하여 균열의 안전점검 시스템을 개발한 연구가 진행되었다(Baek, 2019). 이는 항공 촬영 영상에 R-CNN 기반 Deep Learning 알고리즘을 적용하여 균열을 자동 검축하고, 획득한 영상에 이미지 프로세싱 기법을 적용하여 균열의 폭과 길이를 정량화하였다. 픽셀의 크기를 0.3 mm 정도로 하여 중대하자를 찾아내고자 노력하였다. 하지만 이 또한 이미지 프로세싱을 통해 신뢰도를 높였지만, 균열의 폭과 길이를 추정하여 실제 도출한 포인트 사이의 거리를 측정하는 방법보다 정확하다고 할 수 없다.
이외에 3D 스캐닝 기술을 활용하여 실제 교량 하부와 대형 시험체(Test Specimen)를 대상으로 스캔 실험을 진행한 연구가 있었다. 또한 아울러 도로 포장면의 균열을 대상으로, 무인항공기(UAV) 기반 Structure-from-Motion (SfM) 사진측량과 지상형 라이다를 병행하여 취득한 데이터를 비교·분석한 연구가 있었다. 이들은 근거리에서 0.2~0.3 mm 수준의 균열을 비교적 안정적으로 식별할 수 있었다. 다만, 조도 변화나 먼 거리에서 스캔했을 때 점밀도가 급격히 떨어져 극미세 균열 추적에 어려움이 있음을 지적하였다.
국외에서도 3D 스캐너를 활용하여 미세 균열을 탐지하고자 한 연구가 진행되었다(Wang et al., 2025). 본 연구는 고체 추진제 내면의 미세 폐쇄 균열(closed cracks)을 정밀하게 탐지하기 위해 로봇 기반 회전 선형 레이저 스캐닝 열화상 기술을 사용하였다. 전통적인 3D 스캐닝이 형상과 표면 상태를 시각적으로 복원하는 데 초점을 두는 반면, 해당 연구에서는 열응답 기반의 하위 표면(서브서피셜) 결함 인식에 중점을 두었다.
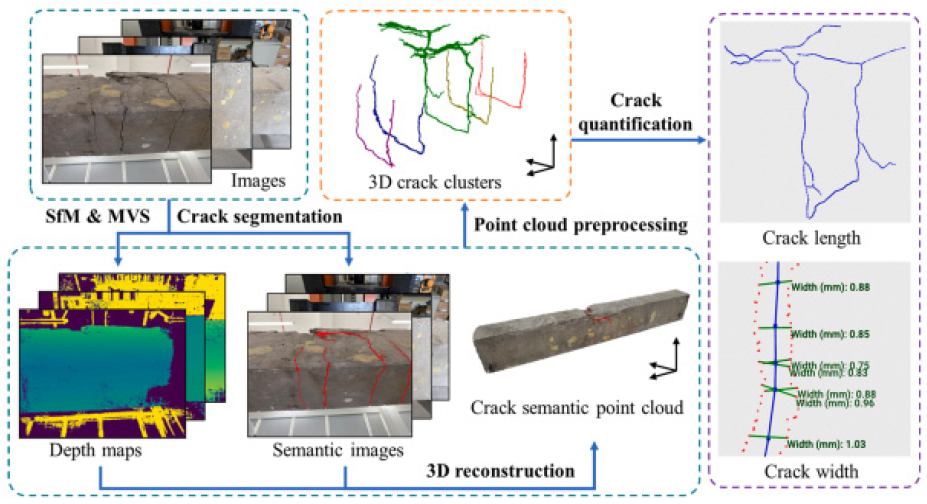
최근 구조물 표면의 균열을 자동으로 탐지하고 정량화하기 위한 기술로 포인트 클라우드 기반 기법이 주목받고 있다. 기존의 영상 기반 방법은 정밀한 위치 정보 확보가 어렵고, 다면에 걸친 복잡한 균열을 정확히 분석하기 어렵다는 한계를 가진다. 이러한 한계를 극복하기 위해, 이미지 기반 딥러닝 균열 탐지와 MVS 기반 3D 재구성을 결합한 아래 Figure 3과 같은 균열 정량화 프레임워크가 제안되었다. (Chen et al., 2025) 본 연구는 포인트 클라우드를 활용해 균열의 위치, 길이, 폭을 고정밀로 자동 정량화할 수 있는 가능성을 보여주었다. 하지만 고정밀 3D 스캐너 대비 좌표의 정확도가 낮고, 실시간 적용이나 깊이 정보 확보에 한계가 있었다.
국내외 선행연구를 종합해 보면, 3D 스캐너와 포인트 클라우드를 활용한 건축물 균열 검출은 이미 0.3 mm 정도의 중대하자 기준에는 어느 정도 대응이 가능할 것으로 판단된다. 하지만 0.1 mm 이하의 극미세 균열까지 정확히 식별하기 위해서는 스캐너 해상도, 거리, 각도 등 측정 조건을 매우 정밀하게 유지해야 하며, 촬영 환경(광원·반사율 등)에 따른 노이즈가 정확도에 직접적인 악영향을 준다.
더욱이 최근에는 딥러닝 기반 알고리즘을 통해 불규칙한 균열 형태를 자동 분류하고자 하는 시도도 많지만, 이러한 기법들조차 극미세 스케일에서 발생하는 데이터 부족과 과적합(overfitting) 문제로 인해 오검출이 생기는 사례가 적지 않다. 따라서, 단순 영상·딥러닝 접근에 의존하기보다는 포인트 클라우드의 기하학적 특성을 명시적으로 파라메트릭화하여, 정확하고 재현성 있는 검출 알고리즘을 구축하는 연구가 더욱 필요하다.
결국, 파라메트릭 기반 알고리즘을 도입해 노이즈를 제거하고, 국부 영역별 특성을 세밀하게 정의함으로써, 현장 환경에서 발생할 수 있는 각종 불확실성을 줄이는 방향으로 연구를 진행해야 할 것이다. 따라서 본 연구 역시 이러한 시각에서, 포인트 클라우드 데이터를 활용한 중대하자(0.3 mm 이상) 균열을 체계적으로 분류할 수 있는 파라메트릭 접근을 제안하고, 실제 Mock-up 테스트 및 시범 적용을 통해 그 정확도와 안정성을 검증하고자 한다.
3. 건축물 표면균열 추출 기준 및 BIM 기반 Mock- up 시나리오 도출
3.1 3D 스캐닝을 통한 표면균열 추출 기준 도출
최근 3D 스캐너 기술은 건축, 토목, 제조, 문화재 보존, 로봇공학 등 다양한 산업 분야에서 필수적인 도구로 자리매김하고 있으며, 그 기술 수준 또한 급속도로 향상되고 있다. 특히 건축물의 유지관리 및 균열과 같은 미세 손상 탐지를 위해 고정밀의 포인트 클라우드를 생성할 수 있는 장비가 요구되면서, 수 mm 또는 sub-mm 단위의 정밀도를 갖춘 스캐너들이 개발되고 있다.
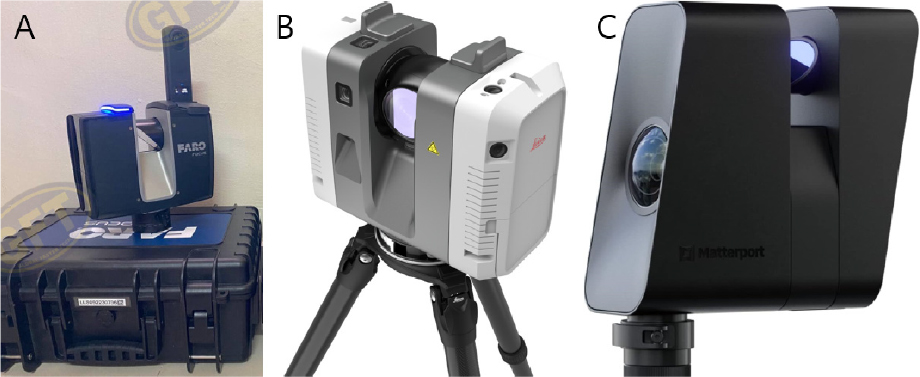
대표적인 3D 스캐너인 FARO Focus Premium 시리즈는 최대 350m까지의 장거리 측정이 가능하며, 초당 최대 2,000,000 포인트의 스캔 속도와 최대 266 MP 해상도의 컬러 이미지 기능을 제공한다. 또한 Leica RTC360은 실측 현장에서의 정합을 자동으로 수행하는 VIS (Visual Inertial System)를 탑재하여 사용자 개입 없이 스캔 데이터를 연결할 수 있다. 또한 HDR 이미지 캡처 기능과 초당 2백만 포인트의 고속 스캔이 가능하여, 복잡한 건축 구조물에 대한 3차원 재현 능력이 탁월하다. 해당 장비는 최대 1 km 범위까지 정밀한 스캔이 가능하고, 고속 회전 거울 기반의 스캐닝 방식으로 효율적인 넓은 영역 측정이 가능하다.
보다 실용적이고 휴대성이 뛰어난 장비로는 Matterport Pro3가 있으며, 해당 장비는 실내외 모두에서 사용할 수 있도록 설계된 경량 LiDAR 기반 스캐너이다. 정밀도는 산업용 스캐너보다 낮지만, 스마트한 워크플로우와 클라우드 기반의 자동 정합 및 모델링 기능을 지원하여 건축물 내·외부 공간의 전반적인 구조 파악 및 디지털 트윈 구축에 적합하다. 다음 Figure 4는 여러 최신 3D 스캐너 장비이다.
국내에서는 유진로봇의 YRL3 시리즈가 실내용 자율주행 및 공간 스캐닝을 목적으로 활용되고 있다. YRL3는 수평 270°, 수직 90°의 스캔 범위를 지원하며, 905 nm 파장의 단일 레이저를 이용해 초당 130,000포인트를 수집할 수 있다. 또한 레이저 파장의 안전성을 고려한 Class 1 수준의 등급을 보유하고 있으며, 컴팩트한 크기와 IP67 등급 방수 설계로 실내 환경에서의 적용성이 높다.
이와 같이 최신 3D 스캐너들은 측정 범위, 정확도, 데이터 처리 속도, 휴대성 등 다양한 측면에서 사용자 요구에 대응하는 형태로 발전하고 있으며, 목적에 따라 다양한 제품이 선택적으로 활용될 수 있다. 특히 건축물의 표면 손상 탐지를 위한 연구에서는 고정밀도와 함께 데이터 후처리 효율성, 자동화 가능성 등을 종합적으로 고려한 장비 선정이 필수적이다.
이에 건축물 외벽에서 발생하는 균열 중 폭이 0.3 mm 이상인 경우는 「주택법 시행령」 및 「공동주택 하자심사·분쟁조정 기준」 등에 따라 중대하자로 분류되며, 즉각적인 보수 조치가 요구된다. 따라서 균열 폭을 정량적으로 판단하기 위해서는 최소 0.3 mm 균열을 명확히 구분할 수 있는 수준의 스캐닝 정밀도가 필요하다. 이를 위해 포인트 클라우드 기반 3D 스캐닝 과정에서 요구되는 최소 해상도, 즉 단위 거리 당 포인트 밀도(Point Density)를 수식으로 도출할 수 있다.
균열의 최소 식별 가능 폭(𝑤)이 0.3 mm일 때, 적어도 두 개 이상의 포인트가 이 균열 폭 내에 존재해야 시각적 또는 알고리즘 상의 인식이 가능하므로, 필요한 최소 점 간격(𝑑)은 다음과 같다.
해당 점 간격을 충족하기 위한 단위 면적당 포인트 수는 1차원 해상도가 아닌 2차원 공간(평면)상에서의 밀도로 계산되며, 이를 𝜌(point density per mm²)라 할 때 다음과 같다.
즉, 균열 폭 0.3mm를 안정적으로 식별하고 정량화하기 위해서는 최소한 1 mm²당 약 45개의 포인트 이상이 확보되어야 한다.
이러한 기준은 스캐너 선택 시 스캐닝 거리, 해상도 설정, 대상 물체와의 거리, 스캔 각도 등에 따라 달라지며, 아래와 같은 관계를 통해도 설명할 수 있다. 스캐너의 해상도를 결정짓는 변수인 각도 해상도 𝜃와 대상까지의 거리 𝑟 간의 관계는 다음과 같다
여기서, 𝑑는 두 포인트 간의 선형 간격(mm), 𝑟은 스캐너와 대상물 간 거리(mm), 𝜃는 라디안 단위의 각도 해상도(rad)이다. 이를 통해 특정 스캐너 사양(예: 수평 해상도 0.1°, 거리 1 m)일 때의 실제 포인트 간격을 역산하여, 0.3 mm 식별을 위한 거리 제한 또는 고밀도 스캔 설정 기준을 도출할 수 있다.
이때 균열 폭 0.3 mm를 판별하기 위해 한 픽셀 단위를 0.01 mm²로 하려면 1억 픽셀(약 100 MP) 이상의 고해상도 카메라가 필요하다. 하지만 일반 RGB 카메라로는 픽셀의 위치 좌표가 없기에, 동일 해상도의 Depth 센서 또는 포인트 클라우드 기반 스캐너가 필요하다.
하지만 건축물의 실측 환경에서는 스캐너와 대상물 간의 거리를 최소화하는 것이 현실적으로 어려운 경우가 많기 때문에, 일정 수준 이상의 이격 거리에서도 균열을 판별할 수 있는 스캐너 사양이 요구된다. 본 절에서는 0.3 mm 폭의 균열을 식별하기 위한 기준 포인트 간격을 0.15 mm로 충족하면서, 스캐너 이격 거리가 1m 이상인 조건을 만족하기 위한 카메라 또는 스캐너의 각도 해상도 및 공간 해상도를 정량적으로 도출하였다.
이격 거리 𝑟 = 1,000 mm일 때, 식별 가능한 최소 포인트 간격을 만족하기 위한 **최대 허용 각도 해상도 𝜃는 다음과 같이 구할 수 있다.
이는 동일하게 카메라의 픽셀 크기 기준에서도 적용되며, 한 픽셀이 0.1×0.1 mm 이하의 영역을 포함해야 균열 경계가 명확히 표현된다. 스캐너 또는 카메라의 이격 거리를 𝑟= 1,000 mm 이상으로 유지하면서, 해당 해상도를 확보하려면 카메라의 시야 범위(측정 범위) 내에 충분한 픽셀 수가 포함되어야 한다.
예를 들어, 카메라가 수평 및 수직 방향으로 1,000 mm× 1,000 mm (= 1 m²)의 영역을 촬영할 경우, 픽셀 간격을 0.1 mm로 유지하려면 1,000/0.1로 10,000 pixels의 해상도가 필요하다. 이는 결국 100 메가 픽셀 이상의 고해상도가 필요함을 의미한다.
이와 같이 정량화된 포인트 밀도 기준은 중대하자 판단을 위한 스캐너 선정, 측정 조건 설정 및 알고리즘 검증에 활용될 수 있다. 본 연구에서는 이러한 계산식에 따라 Mock-up 설계 및 스캐너 사양을 정의하고, 균열 검출 알고리즘의 유효성을 평가하였다.
3.2 파라메트릭 기반 건축물 표면균열 추출 Mock-up 시나리오 도출
다음 Figure 5와 같은 절차로 Mock-up을 수행하고자 한다.
본 연구에서는 건축물 외벽에 존재하는 균열 중 인력중심이 아닌 스마트 기기 및 기술을 활용하여 자동으로 균열의 폭을 측정하여 중대하자 기준에 따라 균열을 구분하고자 한다. 이를 위해 BIM 기반 프로그램인 Autodesk 사의 Revit 2025와 파라메트릭 도구인 Dynamo를 활용하여 디지털 Mock-up을 통해 알고리즘을 개발하고자 한다.
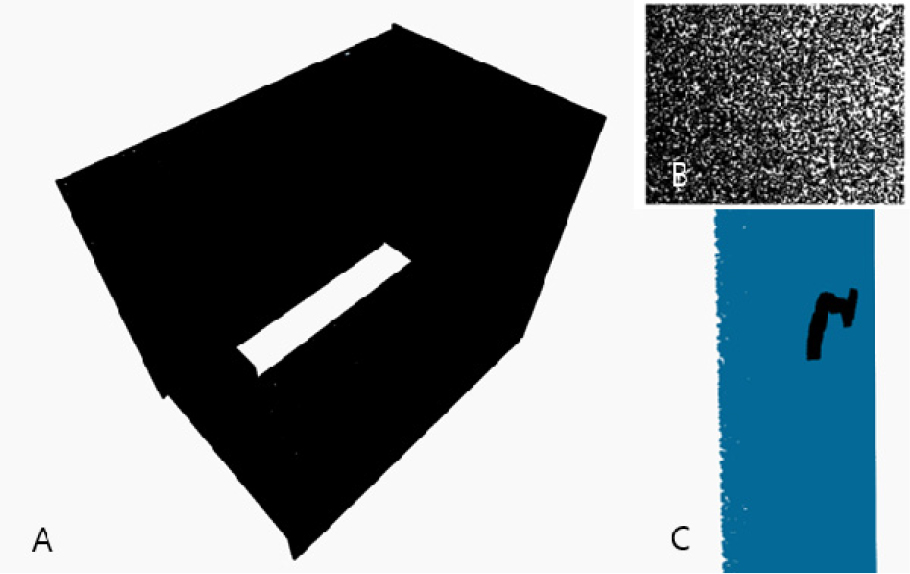
Mock-up에 활용할 건축물을 모델링하고 다양한 형태 및 폭의 균열을 벽면에 생성한다. 이를 Dynamo를 활용하여 포인트 클라우드 데이터를 생성한다. 이때 기준은 앞서 도출한 표면균열 측량 기준에 맞게 포인트의 수를 생성한다.
이후 균열의 폭을 측정하기 위해 균열을 추출한다. 이 과정에서 사람의 시각과 알고리즘을 수행하는 컴퓨터의 시각의 차원에서 고려해야 한다. 사람의 시각에서는 균열을 바로 판별할 수 있지만, 디지털 언어로 소통해야하는 컴퓨터의 경우 이를 고려하여 알고리즘을 개발하여야 한다. 균열 추출을 위해 균열을 포함하고 있는 벽면의 포인트를 모두 추출한 후, 교차판별 과정을 통해 균열 이외의 포인트를 삭제하여 균열에 해당하는 포인트를 추출한다.
추출된 포인트를 활용하여 균열의 외곽선을 생성한다. 이는 균열의 폭을 측정하기 위함도 있지만, 실제 선으로 보일지라도 사실은 수 만개의 포인트로 이뤄져있기 때문에 선을 도출해줘야 한다.
도출된 외곽선과 그를 이루고 있는 포인트를 토대로 모든 경우의 균열 폭을 측정한 후 0.3 mm를 기준으로 중대하자 판별 알고리즘을 개발하여 이를 필터링한다. 이를 통해 자동으로 균열을 추출하고 중대하자를 판별하고자 한다.
4. 포인트 클라우드 기반 표면균열 추출 및 측정 알고리즘 개발
4.1 건축물 표면균열 추출 알고리즘 도출
알고리즘을 개발하기 위해 선제조건을 고정하고 시작하였다. 첫째, 생성한 모든 포인트 클라우드는 각각의 면 별로 그룹화가 되어있어야 한다. 둘째, 모든 포인트는 해당 면에 접해있어야 하며 모든 벽면은 균일하다. 이 두 조건은 결국 3D 스캔을 통해 얻어진 포인트 클라우드의 전처리 과정을 생략하고자 몬 연구에서는 조건을 고정하여 다음 Figure 6과 같이 연구를 진행하였다.
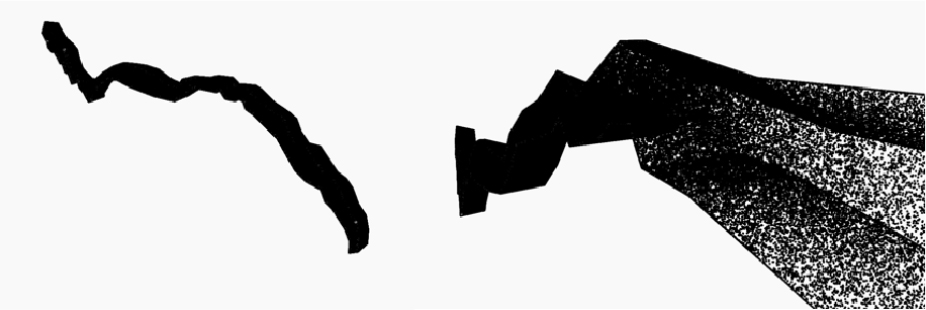
먼저 Excel 형식으로 작성된 포인트 클라우드 데이터를 Dynamo 환경으로 불러올 경우, 해당 데이터는 문자열(String)로 인식되므로 좌표 데이터로 변환하는 과정이 필요하다. 이후 BIM 모델의 벽 데이터를 Surface 데이터로 변환한 뒤, 포인트 클라우드 데이터와의 교차 판별을 수행하여 벽면에 해당하는 포인트를 제외하고 균열에 해당하는 포인트 데이터를 다음 Figure 7과 같이 추출한다.
해당 데이터를 활용하여 균열의 외곽선을 생성하기 위해서는 벽 표면에 가장 가까운 위치의 포인트가 필요하다. 그러나 벽의 배치 방식과 위치(예: 세로 벽, 가로 벽, 대각 벽)에 따라 벽 표면과 가장 가까운 포인트의 좌표값 기준이 달라지므로, 벽의 배치 방식과 위치에 따라 균열 데이터에 대한 정렬을 진행할 필요가 있다.
이를 위해 앞서 진행한 BIM 모델과 포인트 클라우드 데이터 간의 교차 판별 과정에서 제외된 벽면 데이터를 다시 불러와 해당 데이터의 Z 좌표값을 0으로 변환하여 선분 형식으로 변환한다. 이후, 변환된 데이터 중 임의의 두 개의 포인트를 선택하여 연결 선분을 생성한 후, y = 0을 기준으로 해당 선분의 기울기를 측정한다. 마지막으로, 기울기에 따라 균열 포인트 데이터를 회전시켜 균열 데이터를 정렬하여 벽면과 가장 가까운 포인트의 기준이 Y값이 되도록 한다.
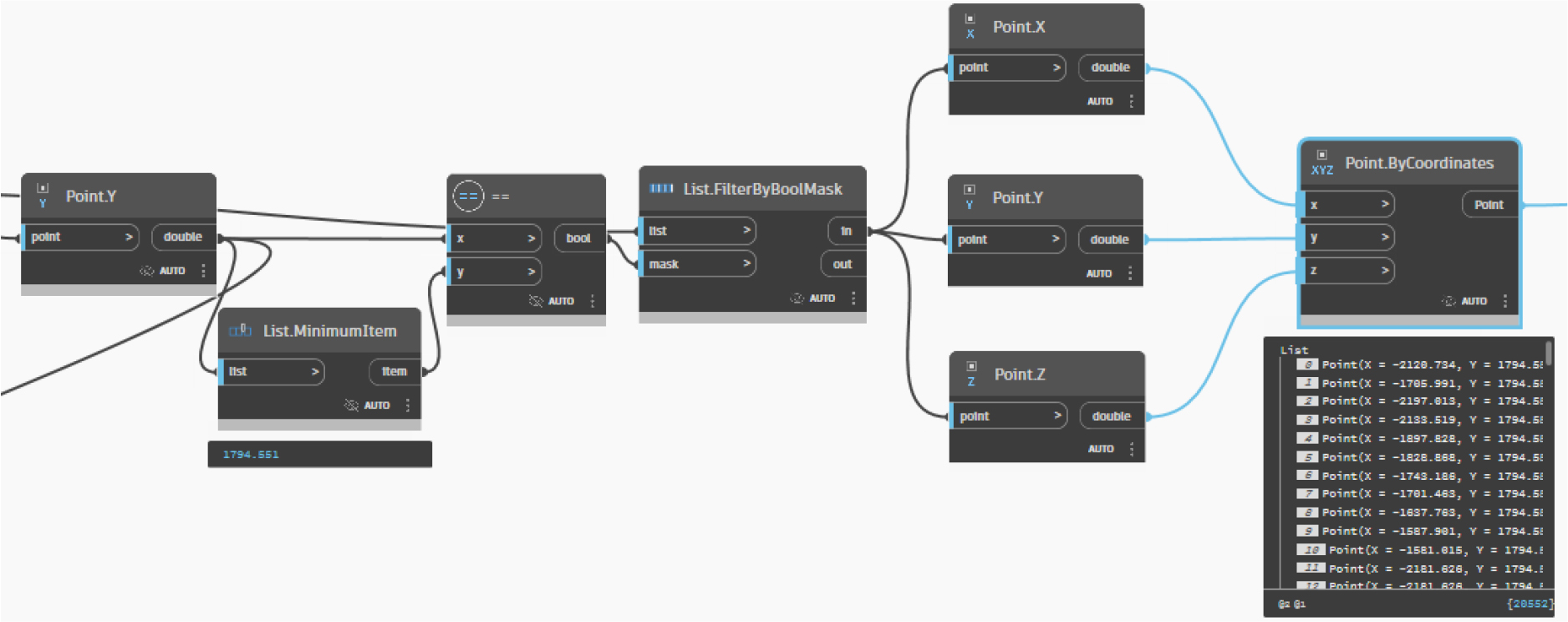
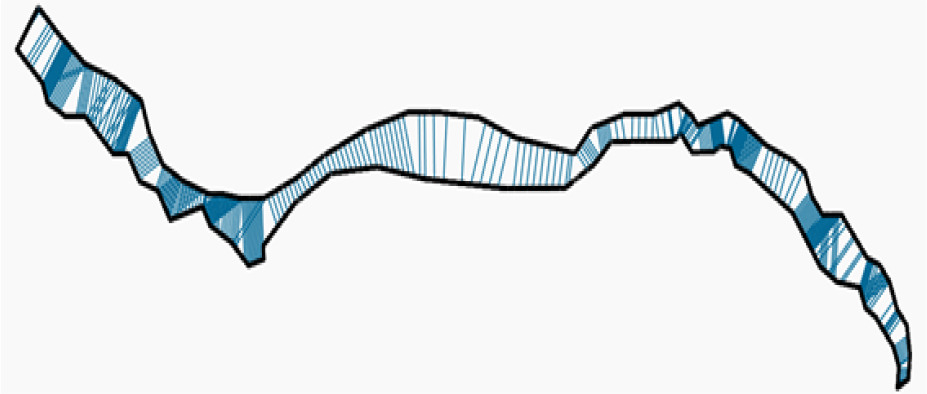
변환을 진행한 데이터를 대상으로 Y 좌표값에 해당하는 데이터를 추출한다. 이후 해당 데이터 중 최소값을 측정하고 전체 데이터 중 이를 Y 좌표값으로 가지는 포인트에 대한 추출을 진행한다. 정렬 이후 가장 작은 Y값을 가진 포인트의 집합체는 벽면에 가장 가까운 포인트들의 집합체이며, 이는 결국 균열의 외곽선에 해당하는 포인트가 된다. 이를 위해 Dynamo로 알고리즘을 개발하였으며, 좀 더 정확한 균열 추출을 위해 Python을 활용하여 진행하였다. 아래의 Figure 8은 균열의 외곽선을 추출하는 전체 알고리즘이다.
추출을 진행한 데이터는 균열의 외곽선의 형태를 이루는 포인트 데이터로 균열의 폭을 정확하게 측정하기 위해서는 포인트 데이터만이 아닌 균열의 외곽선에 해당하는 Line 데이터 또한 필요하다. 그러나 데이터 상 점 데이터가 불규칙하게 배치된 경우, 해당 포인트들의 단순한 연결 방식으로는 올바른 외곽선을 생성하기에 어려움이 있다. 이를 위해 포인트의 순서가 무작위로 배치된 경우에도 가장 가까운 점을 찾아가며 경로를 형성할 수 있는 최근접 이웃 알고리즘을 사용하였으며 다음 Figure 9 와 같이 외곽선을 도출하였다.
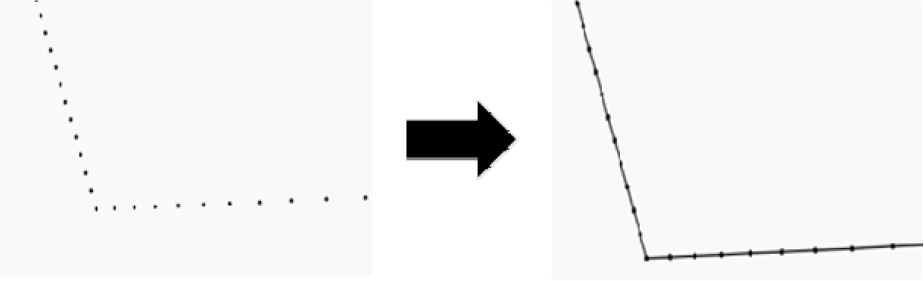
사람이 눈으로 보고 판단하기로는 수만은 점들이 외곽선을 이루고 있는 점들이라는 인식을 한 후 외곽선을 추축하기 위해 점을 연결한다면 순차적으로 연결하면 문제가 없을 것이다. 하지만, 컴퓨터가 인식하기에 2개의 점을 연결하여 외곽선을 추출하고자 할 때, 균열을 이루고 있는 무작위의 점을 선택하여 연결하는 경우가 발생할 수도 있다. 이를 방지하기 위해 인간의 사고과정대로 균열의 외곽선을 추출하기 위해 가장 가까운 이웃점을 찾아 경로를 형성할 수 있는 최근접 이웃 알고리즘을 활용하였다.
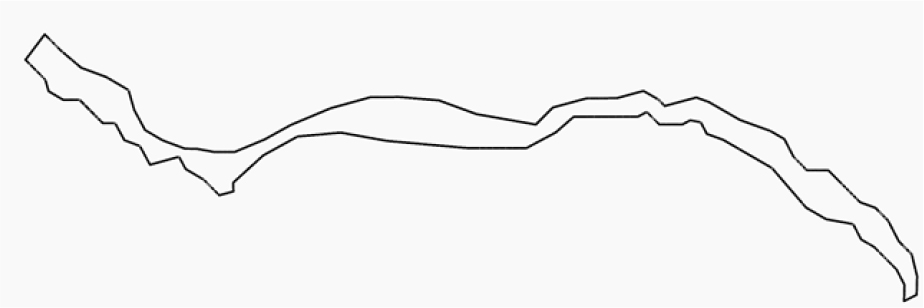
이를 통해 포인트 데이터로부터 군열 외곽선 선분에 해당하는 Line 데이터로 다음 Figure 10과 같이 변환할 수 있었다.
4.2 포인트 클라우드 기반 표면균열 폭 측정을 통한 알고리즘 검증
포인트 클라우드 데이터로부터 균열의 외곽선을 도출한 후 균열 외곽을 나타내는 포인트 리스트와 해당 포인트에 따라 연결한 Line 리스트를 입력 데이터 활용하여 균열의 폭에 대한 측정을 진행한다. 이를 통해 균열의 중대하자 여부 판단과 더불어 개발한 알고리즘의 검증을 수행하고자 한다.
포인트와 Line 데이터를 활용하여 균열의 폭을 측정하는 과정은 아래의 Figure 11과 같다.
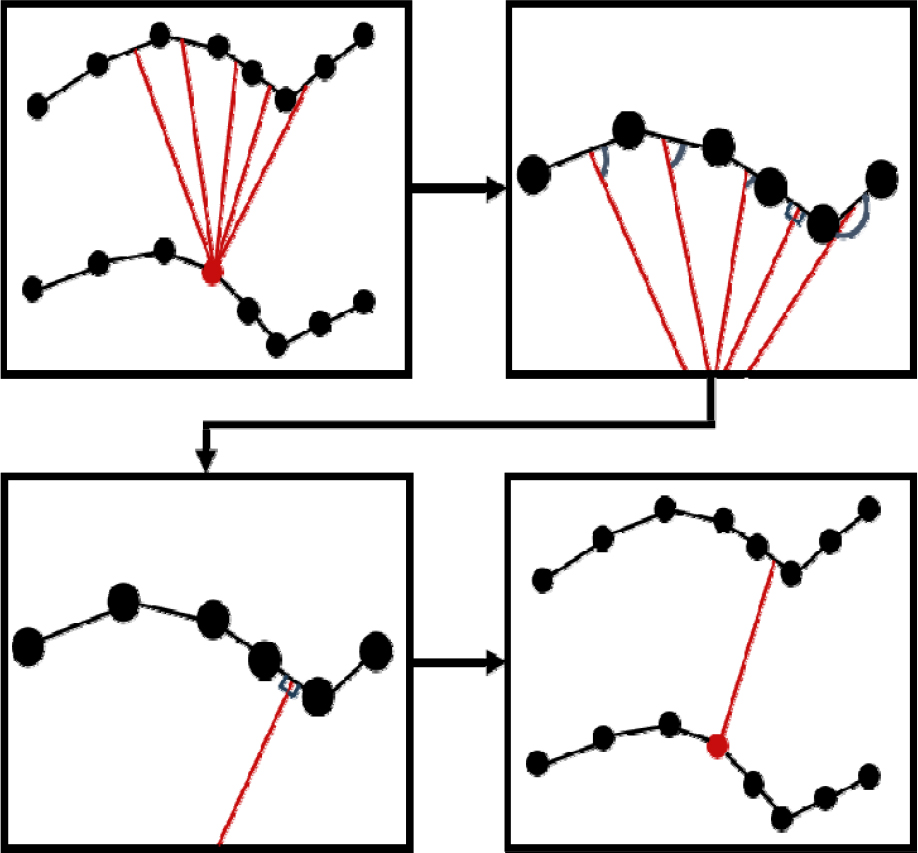
첫째, 포인트와 가장 가까운 Line을 찾고 해당 포인트와 Line을 연결하는 별도의 선분을 생성한다. 둘째, 해당 연결선분과 대상이 된 Line의 직교 여부를 확인하여 연결선분과 Line이 직교하는 경우에만 유효한 연결 대상으로 판단한다. 마지막으로 유효한 연결 대상 중 포인트와 Line 간 거리 기준으로 가장 가까운 연결선만 유지하고, 방향 벡터를 확인하여 평균 방향과 유사한 연결선만 남긴다.
각 단계에 대한 상세 내용은 다음과 같다. 기본적으로 포인트와 Line 사이의 거리를 계산하기 위해 두 포인트 사이의 직선거리를 측정하는 방식으로, 공간상의 두 포인트 사이의 가장 짧은 경로를 나타내는 유클리드 거리(Euclidean distance)를 활용한다. 이 방법은 두 점 사이의 직선거리를 측정하는 가장 기본적인 거리 측정 방식으로, 주로 연속형 특징 벡터 간의 유사도 계산, 군집화, 최근접 이웃 탐색 등의 알고리즘과 같이 쓰인다.
이 방법은 특정 포인트에서 가장 가까운 Line을 찾아 거리를 계산하고, 거리가 일정 임계값 이하인 경우, 유효한 연결 대상 후보로 간주한다. 이후 포인트와 해당 Line을 이어주는 연결 선분을 작성하고 해당 선분과 기존 연결 후보인 Line의 직교 여부를 검토한다. 직교 여부를 판단하기 위해 두 벡터 사이의 관계를 분석하는 방법으로, 두 벡터가 서로 직교할 경우 내적 값이 0이 되는 벡터 내적(dot product)을 이용한다.
최종적으로 연결 후보 중 실질적으로 균열의 폭을 측정하기 위해 유효한 연결선을 찾기 위해서는 평균 방향 벡터를 활용한다. 전체 선분에서 방향 벡터를 구하고, 평균 벡터를 계산하여 특정 연결이 평균 방향 벡터와 유사한 경우에만 유효한 연결로 판별한다. 이후 최종적으로 중복 연결을 방지하기 위해 데이터를 고유한 값으로 변환하는 함수로, 동일한 데이터를 같은 해시 값으로 매핑하여 중복 여부를 빠르게 판별할 수 있는 해시(Hash) 값을 이용한 중복 체크를 수행한다. 다음 Figure 12는 유클리드 거리 측정 프로세스이다.
이 방식은 한두 개 좌표값이 크게 벗어나면 전체 거리가 급격히 증가하게 되는 한계가 있지만, 본 연구 및 실제 과정에서는 포인트의 전처리과정을 거친 후 거리 측정을 하게 되기 때문에 이와 같은 한계에 따른 오차가 발생할 가능성이 현저히 낮다. 또한 본 연구를 수행하는 과정에서도 유클리드 거리를 활용한 측정과정에서 수 만개의 포인트의 모든 쌍 계산을 수행하는 대규모 데이터 계산 작업이기 때문에 PC의 메모리 사용 및 시간적인 측면에서 비효율적인 한계가 드러났다. 하지만, 본 연구에서 가정한 도출되어야 하는 포인트의 개수와 이를 처리할 수 있는 정도의 성능이라고 가정했을 때, 본 연구를 수행하면서 소모된 시간적인 측면과 PC 메모리 사용에 대한 비효율성은 떨어질 것으로 예상된다.
최종적으로 유효한 연결선들을 Dynamo에서 활용할 수 있도록 변환하여 다음 Figure 13과 같이 출력한다.
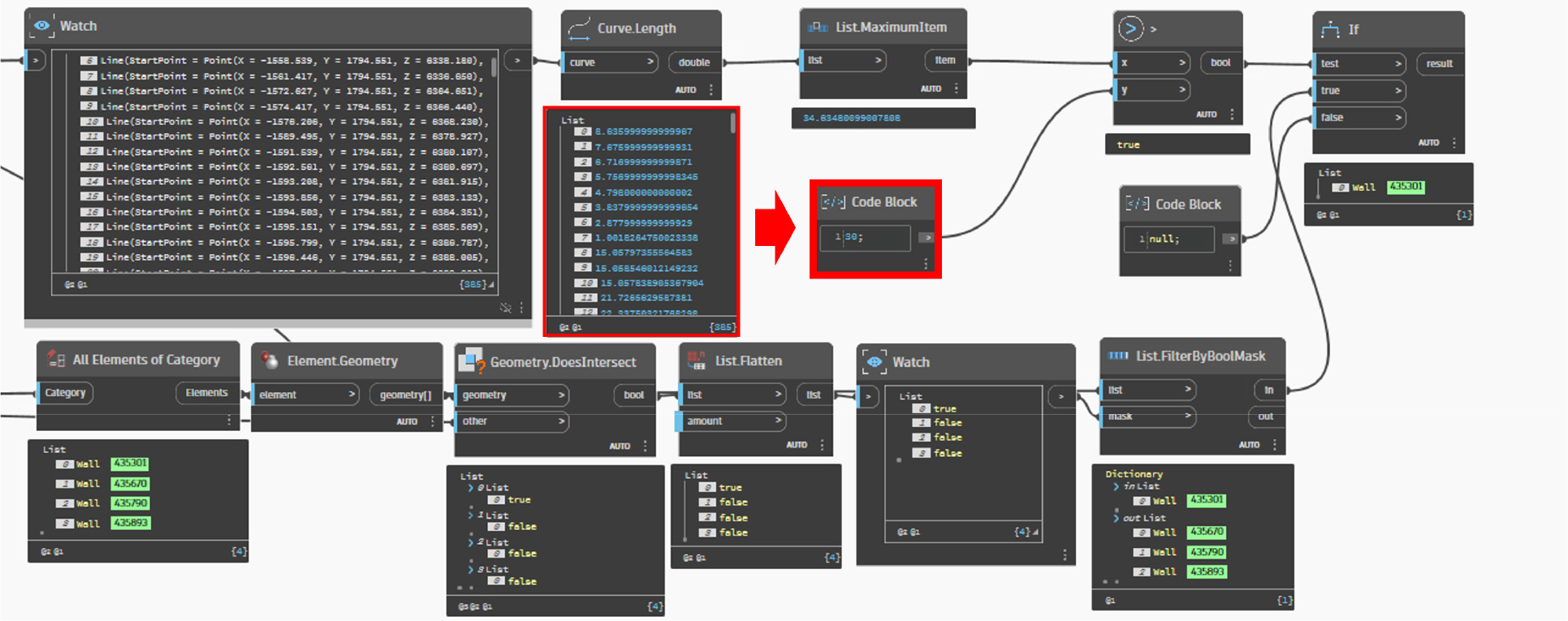
이후 유효한 연결선들에 대한 길이를 측정하여 전체 선분 중 0.3 mm 이상의 길이를 가지는 선분이 존재할 시 중대하자에 해당하는 균열이라 판단한다. 또한 이러한 정보를 활용하여 중대하자에 해당하는 균열이 존재할 때 해당 균열의 원본 형상(회전을 진행하였을 수도 있으니)과 BIM Model 내 존재하는 벽 형상 객체와의 교차 여부를 판단하여 균열이 어떠한 벽에 속해있는지 빠르게 판단할 수 있다.
이렇게 균열의 폭을 측정한 결과는 다음과 같다. 계산의 편의를 위해 실제 포인트 사이 간 거리를 30배 하여 도출하였다.
개발한 알고리즘을 통해 균열의 폭을 측정한 결과 위의 Table 1과 같은 결과가 도출되었다. 이는 균열을 생성할 때, 여러 경우를 고려하기 위해 수직 구간, 수평 구간을 포함하여 균열을 생성하여 폭을 도출하였다. 여러 가지 경우의 균열 폭이 도출되었으며, 이중 최대값을 도출하여 그 값이 중대하자 기준을 넘어서는지를 판별할 수 있었다.
Table 1.
Crack width measurement result
이때, 개발한 알고리즘의 성능 및 신뢰도를 평가하기 위해 알고리즘의 재현성(Reproducibility)과 민감도(Recall)를 측정하였다. 일반적으로 알고리즘의 성능을 평가할 때, 오차율을 우선적으로 측정하지만, 본 연구에서는 포인트의 전처리 과정이 끝난 포인트로 연구를 진행하였으며, 이들 간의 거리를 측정하는 알고리즘이므로 오차율을 측정하지 않았다.
알고리즘의 재현성은 동일한 입력과 환경에서 알고리즘을 반복 실행했을 때, 결과가 얼마나 일관되게 나오는 지를 평가하는 지표이다. 이를 측정하기 위해 위에 언급한 방법을 통해 동일한 하드웨어 및 소프트웨어 환경을 유지하여 정량적 평가를 위해 도출된 균열 외곽의 포인트를 고정한 후 포인트 간의 거리측정을 여러 차례 수행한 결과 모두 동일한 결과값이 도출되었다. 이때 재현성은 변동계수, 즉 평균값에 대한 표준편차의 비율을 측정한다.
본 연구를 통해 개발된 알고리즘의 변동계수는 0%로 측정이 되어 재현성 측면에서는 우수한 정량적 결과를 얻을 수 있었다.
또한 실제 샘플 군 중 알고리즘이 정확히 측정하는 비율인 민감도를 측정하였다. 이는 전체 예측 샘플 중 정확히 측정된 것을 백분율로 나타낸다.
본 연구에서 측정하고자 하는 균열 폭의 대상 포인트의 개수는 435,301개이다. 따라서 개발한 알고리즘을 통해 실제 측정이 되어야 하는 균열 폭의 개수 또한 435,301개가 되어야 한다. 하지만 실제 알고리즘을 통해 도출된 균열 폭의 값의 개수는 374,818개로 나타났다. 이는 동일한 균열 폭이 측정된 경우와 요철의 기울기가 급격하여 유클리드 거리를 통해 측정했을 때, 측정이 불가한 경우에 결과값이 도출되지 않았을 것으로 예상된다. 따라서 본 알고리즘의 민감도는 약 86.11%로 나타났다.
결과적으로 본 연구를 통해 개발한 알고리즘의 성능은 재현성 100% 민감도 86.11%의 결과로 도출되었다.
앞서 언급한 바와 같이 본 연구에서는 포인트 클라우드의 전처리과정을 생략하였으며 포인트들은 한 면에 그룹화 되어있다는 가정을 고정하여 연구 및 실험을 진행하였다. 하지만, 실제 건축물을 대상으로 포인트 클라우드를 3D 스캐닝 등을 통해 얻게 되었을 경우에는 오차율과 앞서 도출한 알고리즘의 성능들이 다르게 나타날 수 있다. 본 연구를 통해 개발한 알고리즘을 실제 현장 및 실무에서 활용하기 위해서는 본 연구에서 생략한 포인트 클라우드 전처리과정을 정교하게 진행하여야 할 것이다.
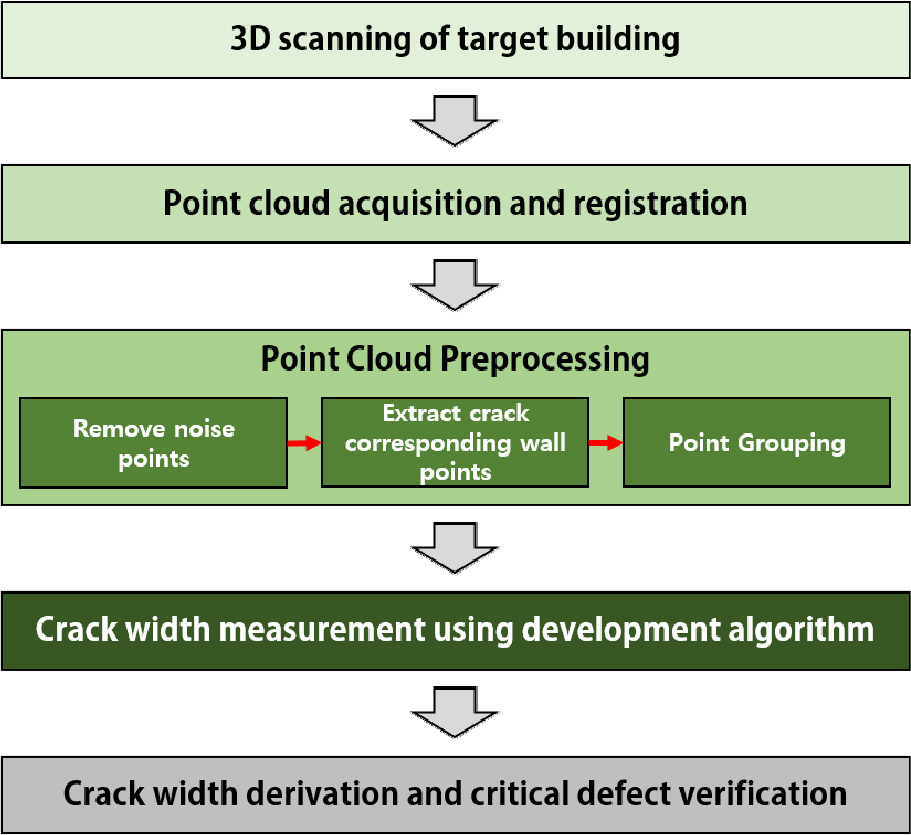
따라서 실제 균열 폭 측정 프로세스는 다음 Figure 14와 같이 수행되어야 한다.
대상 건축물을 3D 스캐닝 등을 통해 건축물의 포인트 클라우드를 얻는다. 획득한 포인트 클라우드를 정합한 후, 전처리 과정을 통해 균열 폭 측정 알고리즘에 적용하기 위해 정제한다. 우선, 노이즈를 제거하여 1차적으로 포인트 클라우드를 정리하고, 균열이 존재하는 해당 벽의 포인트 클라우드를 도출한다. 그런 후 벽에 해당하는 포인트들을 그룹화 하여 본 연구를 통해 개발한 알고리즘에 적용할 수 있도록 준비한다. 이후 과정은 앞서 언급한 프로세스에 따라 진행하여 균열 폭을 측정하고 이를 중대하자 기준에 따라 중대하자 판별을 실시한다.
5. 결 론
본 연구는 포인트 클라우드를 활용하여 파라메트릭 기반의 건축물 표면균열을 추출하고 이의 폭을 측정하여 인력 중심으로 진행되었던 기존의 건축물 사후관리 프로세스를 개선하고 실질적으로 활용할 수 있는 알고리즘을 개발하고자 하였다. 이에 알고리즘 개발 및 검증을 하기 위해 파라메트릭 도구를 활용하여 Mock-up을 진행하였다.
현재 건축물의 균열 폭을 측정하기 위해 측정자의 경험에 의존한 육안검사를 거쳐 중대하자로 판단되는 균열에 균열 측정 게이지를 통해 인력 중심의 수작업으로 수행되었다. 이는 실제 중대하자에 포함되는 균열을 놓칠 가능성이 있을 뿐만 아니라, 게이지를 통해 도출되는 폭의 측정값 또한 0.1 mm 단위의 눈금을 사람이 읽어내기 때문에 오차가 발생할 수 있다. 따라서 이를 보완 및 극복하고자 3D 스캐너를 활용하여 얻은 포인트 클라우드를 바탕으로 자동 균열 추출 및 균열 폭을 측정하고자 하였다.
이와 같이 진행하기 위해 우선, 중대하자 기준인 0.3 mm를 판별할 수 있도록 포인트 클라우드를 획득할 수 있도록 하여야 한다. 따라서 3D 스캐너 및 카메라의 사양 및 필요 포인트의 개수를 0.1 mm 단위의 픽셀을 기준으로 도출하였으며, 이를 기반으로 Mock-up을 실행하였다.
생성된 포인트 클라우드 데이터에서 균열에 해당하는 포인트를 추출하고 외곽선을 도출한 다음, 이를 유클리드 거리 측정법을 활용하여 균열을 이루고 있는 포인트 중 외곽선 내에 인접한 포인트가 아닌 다른 포인트와의 거리를 측정하였다. 이때, 포인트 클라우드의 전처리 과정을 생략하기 위해 생성된 포인트와 벽면에 대한 조건을 2가지 부여하였다. 우선, 생성한 모든 포인트 클라우드는 각각의 면 별로 그룹화가 되게 하였으며, 모든 포인트가 해당 면에 접해게 하였고 생성된 벽면은 균일하다는 조건을 고정하여 Mock-up을 수행하였다.
이 중 최대값을 도출하여 중대하자 기준을 초과하는지 판별하였다. 결과적으로 이 과정에서 균열의 외곽선 추출 및 균열 폭을 측정할 수 있는 파라메트릭 기반 알고리즘을 개발하였다.
개발한 알고리즘은 재현성 및 민감도 평가를 통해 알고리즘의 성능을 측정하였으며, 100%의 재현성과 높은 민감도가 측정되었다. 이에 따라 본 연구를 통해 개발한 알고리즘의 신뢰도를 확보하였다.
본 연구는 디지털 Mock-up을 통해 진행되어 여러 한계점을 안고 있다. 우선 본 연구의 목적과 같이 건축물 사후관리 시 중대하자에 해당하는 균열인지를 판별하기 위해 3D 스캐너의 사양과 필요 포인트를 도출하였다. 하지만 아직 통상적으로 사용가능한 3D 스캐너의 기술이 도출한 사양만큼 개발되지 않았으며, 이에 충족하는 기기를 사용하기 위해서는 기기 자체와 사용하는데 필요한 경제적인 문제점이 있다. 일반적으로 스캐닝 과정을 수행할 경우의 이격거리를 유지하기 위해 3.1와 같은 기준이 도출되었지만, 이를 극복하기 위해 이격거리를 최소한으로 줄이고 스캐닝 중첩도를 높인다면 도출된 조건보다 낮은 사양으로도 가능해질 것으로 판단된다.
Mock-up 과정에서 생략했던 전처리 과정 또한. 현재 이를 자동화하기 위한 연구가 진행되고 기술이 개발되고 있지만, 여전히 수작업이 필요한 과정이다. 이를 극복하기 위해 후속 연구로 인공지능을 활용하여 수많은 균열 데이터를 학습하여 균열에 해당하는 포인트만 추출할 수 있는 연구를 진행할 예정이다. 이러한 연구를 통해 본 연구에서 설정한 조건들을 고려하지 않고도 자동화될 수 있는 알고리즘을 개발하여 보완하고자 한다.
본 연구는 딥러닝 및 이미지 프로세싱 등의 방법론과 같이 균열의 폭 등을 추측을 통해 측정한 것과 달리 파라메트릭 기반의 알고리즘을 통해 실제 균열의 포인트에서 균열의 폭을 측정함으로써 실효성과 신뢰도가 높다고 판단된다. 또한 향후 위에서 언급한 바와 같은 연구를 진행하여 건축물 사후관리의 전 과정을 아우를 수 있는 알고리즘을 개발하여, 부분 자동화가 아닌 전 프로세스 자동화를 꾀하고자 한다. 이를 통해 인력중심으로 이뤄짐으로 발생하였던 문제점을 해결하고 개선하여 실질적으로 실무에 활용될 수 있는 기술이 될 것으로 기대한다.
