

1. 서 론
1.1 연구의 배경
1.2 연구방법
2. 이론적 고찰
2.1 관련 연구 조사
2.2 사용자 중심의 3D 스캔 기술의 분류
2.3 국내외 기술현황
3. 현장 테스트를 통한 활용성 평가
3.1 실내 공간 현장 테스트
3.2 건설현장 테스트
3.3 테스트 결과 종합 분석
4. 결론
1. 서 론
1.1 연구의 배경
3D 스캔 기술은 ICT 기술의 발전과 함께 건설, 영화, 게임 등 여러 분야에 활용되고 있다. 최근에는 3D 스캔에 활용되는 센서와 알고리즘이 고도화되면서 더욱 정밀하고 빠르게 스캔 데이터를 확보할 수 있게 되었다. 이에 건설 분야에서도 건축물의 유지관리 및 역설계, BIM 시뮬레이션, 드론을 활용한 현장관리 (Lee and Kim, 2020) 등 여러 영역에서 3D 스캔 기술을 활용하려는 시도들이 확대되고 있다. BIM 데이터와 함께 활용하는 경우 가상공간 안에서 실제 건축물이 기존 설계와 어떤 차이가 있는지 더욱 비교하기 쉽고, 현실에서 반영하기 어려운 수정사항들을 쉽게 적용해볼 수 있는 장점이 있다.
2018년 국토교통부에서는 스마트 건설기술 로드맵을 발표하였고 향후 건설 분야에서의 ICT 기술 활용은 더욱 확대될 것으로 예상된다 (Im, 2021). 이에, 여러 기업들이 디지털 전환을 통한 ICT 기술의 도입을 시도하고 있으나 국내 3D 스캔 기술의 경우 아직 보편화 되어있지 않고, 원천 기술을 보유한 기업 또한 부족한 실정이다. 또한, 오늘날 3D 스캐닝 관련 기술들은 특정 소프트웨어가 주도하는 것이 아닌 국내외 여러 소프트웨어들이 혼합되어 활용되고 있고, 스캔에 활용되는 장비 또한 매우 다양하다. 이로 인해 어떤 소프트웨어와 장비를 활용하는지에 따라 매우 다른 스캔 결과로 이어지며, 3D 스캔 진행시 어떤 방식이 효율적인지 선택하기 어렵다는 문제점이 있다.
이에 본 연구에서는 효율적인 3D 스캔 작업 수행을 위해 국내외 3D 스캔 관련 기술들과 스캔 작업에 활용되는 장비들을 조사하였다. 이후 실제 현장에서 테스트를 진행하여 3D 스캔 작업 시 소요되는 시간과 최종 퀄리티 등 여러 요소들을 비교하고, 특정 환경에서 스캔 작업 시 고려해야 할 사항들을 분석하여 각 현장 상황에 적합한 3D 스캔 작업 방식을 도출하고자 한다.
1.2 연구방법
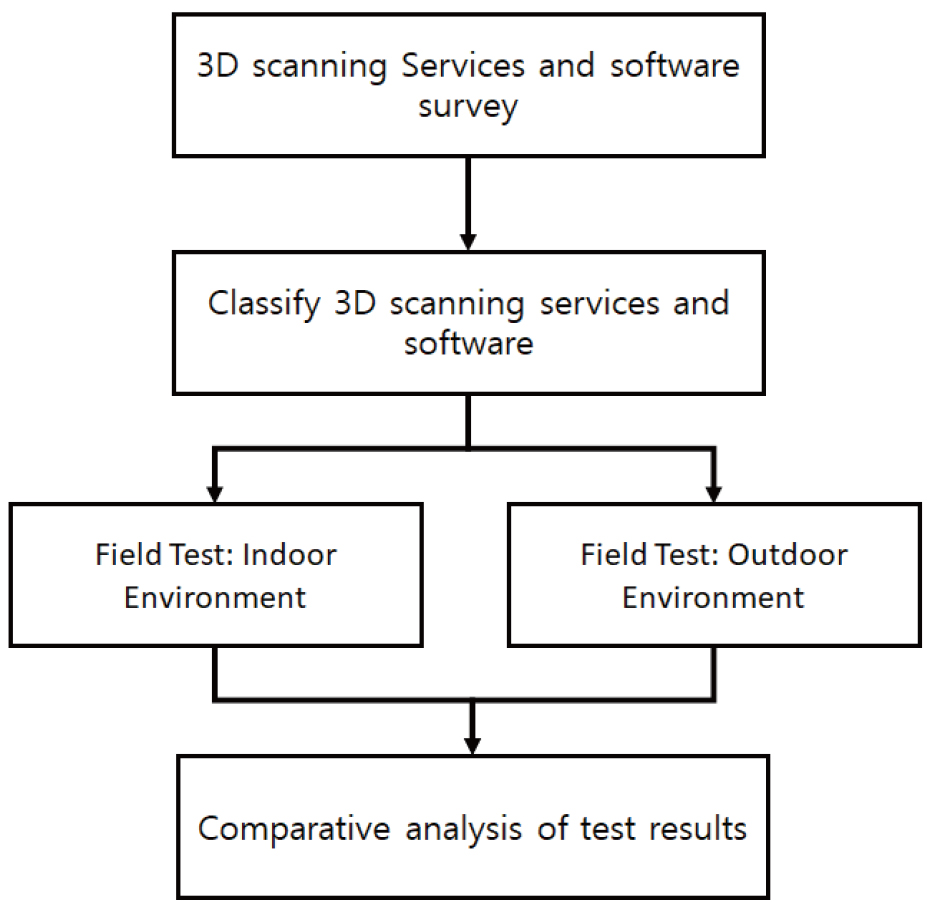
본 연구에서는 각 기업 또는 연구 기관의 효율적인 3D 스캔 작업의 진행을 목표로 최근 주로 활용되고 있는 국내외의 3D 스캔 관련 소프트웨어 및 서비스들을 대상으로 연구를 진행하였다. 사용자의 입장에서 각 기술들을 구성하는 알고리즘과 스캔 작업의 절차, 활용되는 데이터와 장비에 따라 기술들을 분류하고 해당 기준에 따라 각 서비스 및 소프트웨어들을 직접 테스트하였다.
현장 테스트를 위한 공간으로는 실내 공간인 사내 사무실 공간과 대학 강의실 공간, 실외 공간으로 서울 시립 청소년 음악 창작센터 건설 현장을 선정하였다. 사무실 공간과 대학 강의실 공간은 동일한 실내 공간 환경에서 개방된 정도와 기타 오브젝트들의 유무에 차이가 있으며, 실외 건설현장에서는 빛의 영향을 많이 받는 외부 현장과 어두운 지하 주차장 공간에 차이를 두어 현장 환경이 스캔 작업에 미치는 영향을 비교하였다. 각 테스트 현장마다 앞서 분류한 여러 소프트웨어 및 장비들을 활용하여 테스트를 진행하고, 스캔 작업에 소요된 시간, 작업 절차의 편의성, 모델링 구성에 소요되는 시간과 모델링 퀄리티 등을 분석하였다.
2. 이론적 고찰
2.1 관련 연구 조사
3D 스캔 기술이 발전하면서 건설현장 또는 건축물에 3D 스캐닝 기술을 적용한 다양한 연구들이 이루어졌다. 스캐닝 기술에는 주로 레이저 스캔 방식이 활용되는 경우가 많았는데 (Kwon, 2009)의 연구에서는 레이저 스캐닝 기술의 원리와 특징들을 비교하고 건축물 역설계와 시공, 건설현장의 적용 사례들을 분석하였다. 드론과 레이저 스캐닝 기술을 함께 활용하여 역설계를 진행하고 BIM 데이터를 구성하는 연구도 진행되었다 (Jung et al., 2019). 해당 연구에서는 3D 스캐닝을 활용한 역설계를 통해 시간 단축과 비용 절감의 장점이 있으나 Point Cloud 방식에서 발생하는 폐색 문제와 모델링 구성에 많은 시간이 소요되는 문제점이 있음을 검증하였다. (Kang, 2020)의 연구에서는 레이저 스캐닝 방식이 아닌 Lidar를 활용한 SLAM 방식을 기준으로 프로토타입을 개발하고 건축물의 원격 스캔 시스템 개발 시 고려사항을 제안하였다.
3D 스캐닝과 BIM 데이터를 함께 활용하는 연구들도 진행되었다. (Lee and Kim, 2020)은 건축공사의 품질검사에 3D 레이저 스캐닝 기술을 활용하여 골조나 마감의 정밀도를 빠르게 측정하였다. 이를 통해 공사 단계에서 3D 스캐닝과 BIM을 활용한 품질 검사의 장점을 확인하였으며, 설계도면이 BIM으로 작성되어야 더 효율적인 결과 비교가 가능함을 보였다. (Hwang et al., 2021)의 연구에서도 BIM과 3D 스캐닝을 함께 활영하였으며 건축물 데이터의 수치를 비교하였다. 수치 측정 결과 실외에서는 큰 차이를 보이지 않으나 내부 형태와 수치에 차이를 보이는 경우가 많았고, 이는 현장 여건과 정확하지 않은 도면으로 인한 결과로 나타났다.
기존 연구들을 통해 3D 스캐닝 기술의 장점과 건설현장 적용시의 효율성은 확인할 수 있었다. 하지만 많은 연구들이 특정 스캔 방식과 장비를 활용한 결과를 제시하고 있으며, 현재의 다양한 스캔 방식과 소프트웨어들 중 어떤 방식이 더 효율적인지 알기 어렵다는 한계가 있다. 본 연구에서는 현재 활용 가능한 기술 및 소프트웨어들과 여러 장비들의 테스트를 통해 사용자의 효율적인 3D 스캔 작업에 초점을 두었다. 각 현장 상황과 프로젝트의 요구 조건에 적합한 스캔 방식을 선정하고 디지털 트윈 모델링을 확보하기 위한 고려사항들을 제안한다.
2.2 사용자 중심의 3D 스캔 기술의 분류
오늘날 3D 스캔 기술에는 일반 스마트폰 카메라부터 각 기업에서 자체 개발한 고성능 레이저 스캐너, 3D 카메라 등 다양한 장비들이 활용되고 있다. 또한, 스캔 데이터를 활용하여 3D 모델링으로 구성하는 소프트웨어들도 매우 다양하게 존재하여 어떤 소프트웨어와 장비를 활용하는지에 따라서 스캔 결과물의 품질에 많은 차이가 발생하게 된다. 이에 효율적인 3D 스캔 작업을 위해 어떤 소프트웨어와 장비들을 활용해야 하는지, 국내외에 어떤 기술들이 존재하는지 조사 후 사용자 중심으로 각 기술들을 분류하였다.
3D 스캔작업은 크게 현장 데이터의 취득, 알고리즘을 이용한 데이터 처리, 데이터 필터링 및 보정, 최종 모델링 생성 과정으로 이루어진다. 이때 활용하는 기술에 따라 사용자는 이미지 데이터를 얻을 수도 있으며, Point Cloud 데이터를 얻게 될 수도 있다. 또한, 스캔 작업과 모델링 구성이 현장에서 함께 이루어질 수도 있으며, 현장에서 스캔 작업 이후 모델링 구성은 따로 이루어지는 방식도 있다. 따라서 전체 스캔 절차는 유사하더라도 활용하는 데이터와 스캔에 활용되는 장비, 모델링 구성까지 과정 등에 많은 차이가 존재한다.
본 연구에서는 사용자 입장에서 각 기술들을 활용 시 구분되는 여러 차이점에 따라 Photogrammetry 방식과 SLAM 방식, Point Cloud 후처리 방식의 3가지로 분류하고자 한다.
Table 1.
Classification of 3D scanning technology and features of each method
2.2.1 Photogrammetry 방식
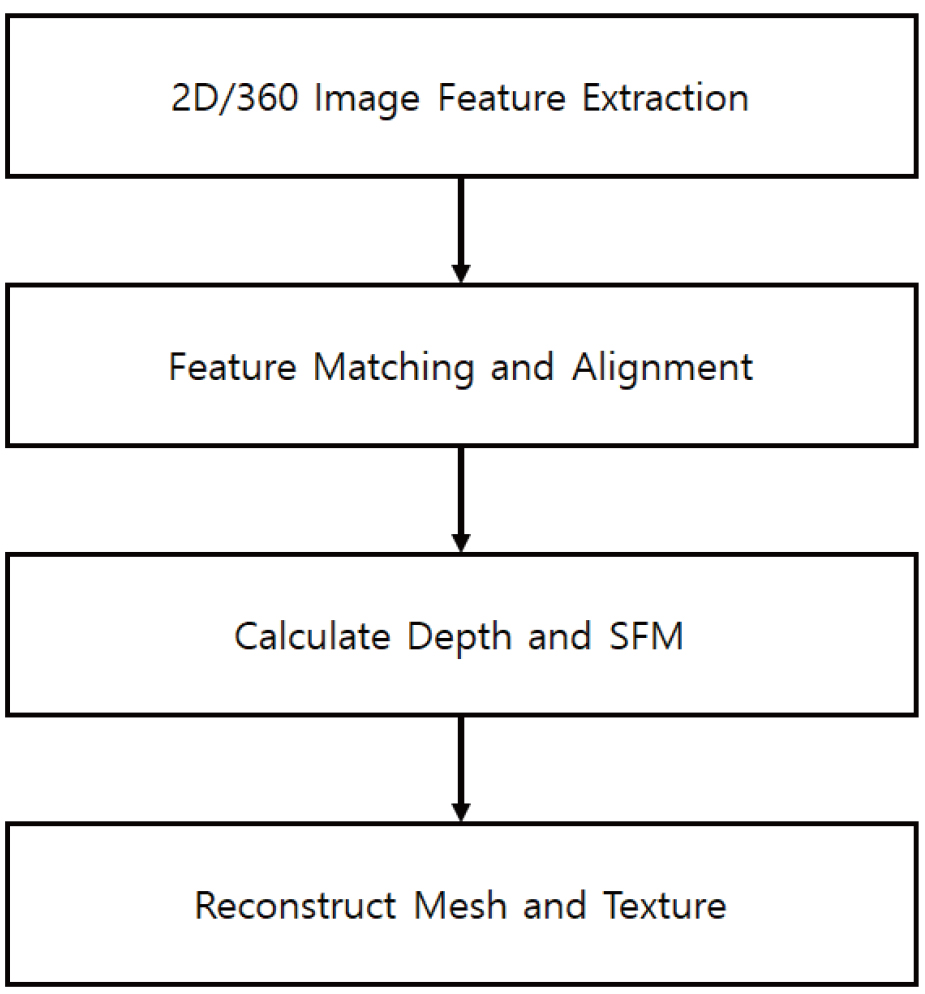
Photogrammetry 방식은 주로 일반 2D 이미지 또는 360 이미지를 활용하는 방식으로, 스캔 작업을 통해 얻은 이미지 데이터를 3D 스캔 소프트웨어에 입력하여 3D 모델링으로 구성한다.
먼저, 서로 다른 이미지들로부터 특징점들을 추출한다. 추출된 특징점들을 비교하여 공통된 지점들을 찾고 이를 통해 인접한 이미지들을 연결한다. 이후 촬영에 사용된 카메라의 정보와 나열된 이미지들을 조합하여 사진이 촬영된 카메라의 위치를 역으로 계산한다. 계산된 카메라 위치 정보와 특징점들은 3차원 공간 안에서 재구성되어 하나의 3D 모델링으로 변환된다.
Photogrammetry 방식은 주로 이미지 데이터를 활용하여 DSLR 카메라 또는 스마트폰과 같이 비교적 저렴한 장비로도 스캔 작업이 가능하고, 휴대성이 뛰어나다는 장점이 있다. 하지만 특정 오브젝트를 기준으로 각 이미지가 일정 영역이 겹쳐지도록 여러 장의 이미지를 촬영해야 하는데 이로 인해 3D 모델링 구성에 매우 많은 이미지가 필요하여 스캔 작업이 오래 걸린다는 단점이 있다.
일반적으로 사용자가 직접 이미지 파일들을 가지고 Photogrammetry 관련 소프트웨어에 입력한 다음 설정값들을 조정하여 3D 모델링으로 구성하는 과정으로 이루어진다. 스캔 작업과 모델링 구성이 별도의 공간에서 이루어지기 때문에 최종 모델링 구성 이후 품질이 낮은 경우 이미지 스캔 작업을 다시 해야 하는 번거로움이 존재한다. 최근에는 이런 단점들을 개선하여 현장에서 바로 이미지 파일들을 클라우드 서버로 업로드 후 모델링 결과물을 확인할 수 있도록 지원하는 서비스들이 이루어지고 있다.
2.2.2 SLAM 방식
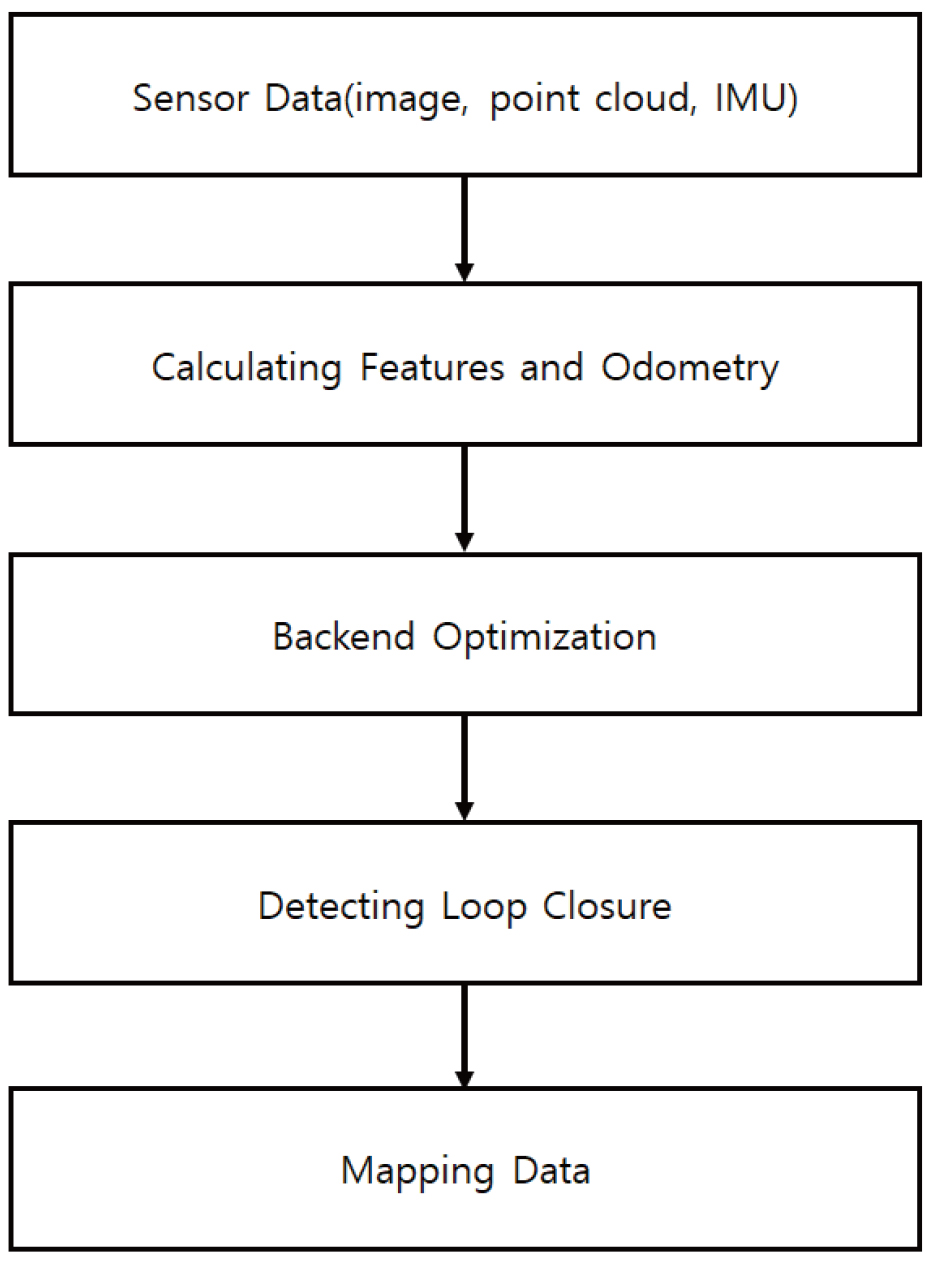
SLAM(Simultaneous localization and mapping) 방식에서는 센서가 이동하면서 스캔을 진행하여 현재 위치와 주위 공간 데이터를 함께 추적하고, 이를 지도 형식으로 구성하는 순서로 작업이 이루어진다 (Song and Hwang, 2014). SLAM 방식은 크게 영상 데이터를 활용하는 Visual SLAM과 레이저 센서를 활용하는 Lidar SLAM 두 가지로 구분 가능하다. 최근에는 iPhone과 iPad에 Lidar 센서가 탑재되면서 일반 사용자들도 쉽게 활용 할 수 있게 되었고, Lidar SLAM 방식의 서비스들이 더욱 확대되고 있다.
SLAM 구조에서는 각 프레임마다 센서로부터 들어오는 데이터들을 계산하여 특징값들을 이전 프레임의 데이터와 비교하고 Odometry라고 하는 위치 추정 작업을 반복한다. 동시에 Backend Optimization 과정을 통해 Odometry에 누적되는 노이즈 값들을 필터링하고 현재 추정된 위치 상태가 정확한지 검증한다. 이후 Loop Closure가 존재하는지 확인하는 과정을 거치는데 이는 기존에 방문했던 위치를 다시 방문했는지 확인하고, 현재 센서 데이터와 기존 데이터를 연결하여 누적된 오차 데이터를 감소시키고 정확도를 향상하는 작업이다.
Lidar를 활용한 SLAM 방식은 이미지 기반의 Photogrammetry 방식에 비해 빛의 영향을 덜 받기 때문에 실외 환경에서도 비교적 높은 품질을 기대할 수 있으며, 모델링 생성에 소요되는 시간이 짧고, 사용자가 모델링 생성 과정을 실시간으로 확인할 수 있다는 장점이 있다. 하지만 알고리즘을 처리하는 하드웨어의 성능에 영향을 많이 받으며, 스캔 시간이 길어질수록 위치 추정과정에서 오류가 누적될 수 있는 단점이 있어 이를 해결하기 위한 알고리즘의 성능이 중요하다 (Kim, 2021).
센서와 함께 현장을 이동하며 데이터를 취득하는 방식으로 이루어진다. 사용자가 직접 데이터를 다루지 않더라도 스캔과 모델링 구성이 동시에 이루어지기 때문에 비교적 작업 절차가 간편하며 스캔 진행 사항을 눈으로 확인할 수 있다.
2.2.3 Point Cloud 후처리 방식
Point Cloud 후처리 방식은 스캔 범위와 정밀도에 따라 활용되는 스캐너의 종류가 다양한데 데이터 측정 방식에 따라 크게 레이저 방식과 광학 방식으로 구분된다. 최근에는 정밀한 Point Cloud 데이터를 확보하기 위해 ToF(Time of Flight) 방식의 고정식 레이저 스캐너가 많이 활용되고 있으며, 넓은 범위의 공간을 정밀하게 스캔 가능하지만 가격이 비싸고 무거워 휴대성이 떨어지는 단점이 있다.
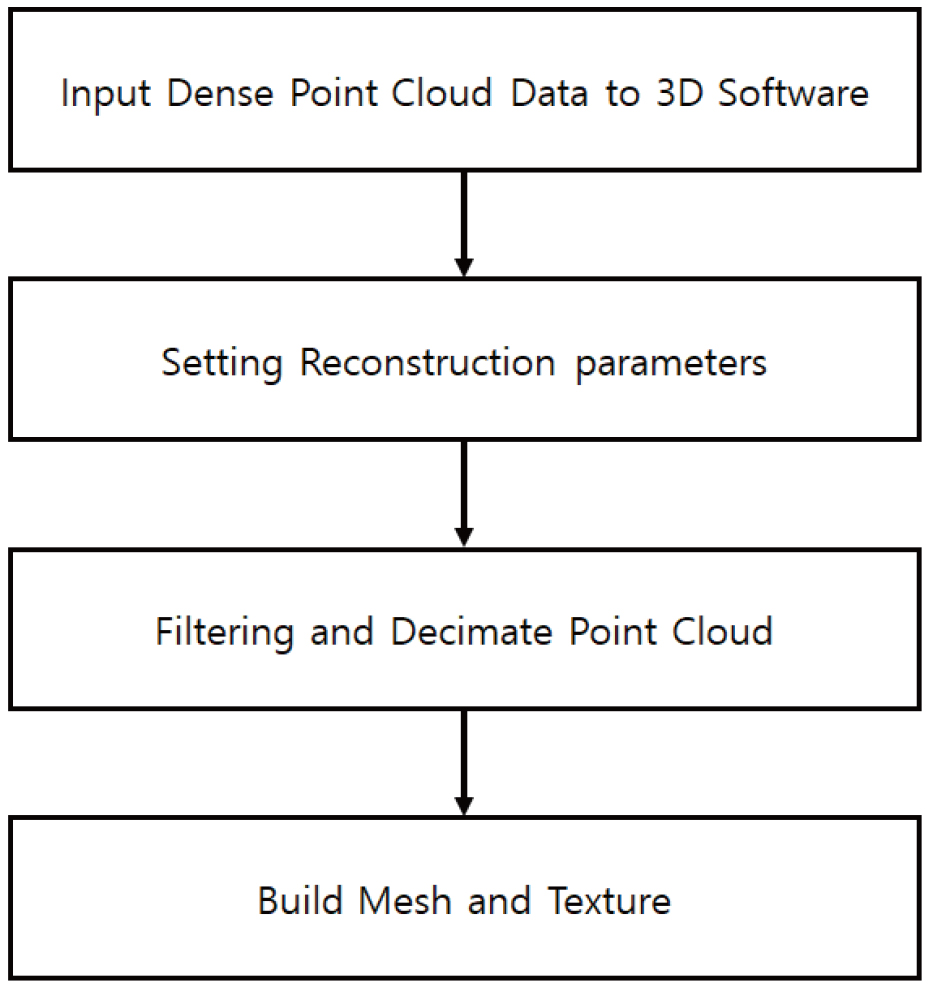
Point Cloud 후처리 방식의 경우 일반적으로 스캔 장비를 활용하여 해당 공간의 Point Cloud 데이터를 확보 후 3D 스캔 전용 소프트웨어를 통해 3D 모델링 데이터로 재구성하는 과정으로 이루어진다. 3D 소프트웨어에서는 사용자가 목표 정밀도와 Point Cloud 필터링 옵션, 모델링 구성 방식 등 설정값들을 직접 조정하여 모델링 생성 작업을 진행한다. 이후 Point Cloud의 노이즈를 제거하고 데이터 사이즈를 줄이는 필터링, Decimate 과정을 거치고, 알고리즘에 따라 유사한 Point들을 연결하여 Mesh로 구성한다. Mesh 구성 이후 Normal 값들을 계산하고 모델링의 색상에 해당하는 Texture 파일을 구성하여 Mesh 데이터와 연결하여 최종 3D 모델링 파일로 변환한다.
사용자 입장에서는 스캔 작업과 모델링 구성 작업이 구분되며 원하는 소프트웨어와 품질을 선택하여 모델링 데이터를 얻을 수 있어 자유도가 높은 장점이 있다. 하지만 데이터가 크고 소프트웨어 성능에 많은 영향을 받으며 옵션 설정에 따라 모델링의 품질 차이가 나기 때문에 사용자에게 소프트웨어 활용과 관련된 기술 이해도가 요구된다.
2.3 국내외 기술현황
현재 활용되고 있는 3D 스캔 관련 기술들은 대부분 해외에서 개발되어 서비스 되고 있으나 국내에서도 자체 기술 개발을 통해 3D 스캔 서비스를 지원하는 기업들이 점차 늘어나고 있는 추세이다. 2.3절에서는 국내외 3D 스캔 관련 서비스와 소프트웨어들을 조사하고 2.2절에서 분류한 3가지 방식의 기준에 따라 구분하였다.
2.3.1 Photogrammetry 관련 기술
Photogrammetry 관련 소프트웨어는 상용 소프트웨어뿐만 아니라 무료로 사용 가능한 오픈소스 프로젝트까지 매우 다양한 소프트웨어들이 존재한다. 또한, 스마트폰 있다면 누구나 쉽게 이미지로부터 3D 모델링을 생성하는 것이 가능하여 전 세계 많은 사용자들이 활용하고 있다.
AliceVision에서 개발한 오픈소스 소프트웨어 Meshroom은 오픈소스임에도 다른 상용 소프트웨어들과 비교해 퀄리티면에서 큰 차이가 없는 모델링을 얻을 수 있을 정도로 뛰어난 기술력이 장점이다. 한 번의 클릭만으로 전체 프로세스의 실행 및 최종 결과물의 확인이 가능할 정도로 활용하기에 간편하다. 또한, 기술 관련 문서화 정리가 잘되어 있어 사용자가 각 옵션에 따른 차이와 해당 기능이 최종 모델링 결과물에 미치는 영향 등을 파악하기 수월하다. Meshroom에서는 SDK 형태로 각 기능 구현에 필요한 부분만 따로 개발하거나 수정이 용이한 방식으로 지원하고 있어 별도의 프로젝트 개발 연동에도 효율적이다.
해외 상용 소프트웨어 중에서는 Autodesk 사의 Recap과 Agisoft 사의 Metashape, 3DFLOW에서 개발한 3DF Zephyr, Epic Games에 인수된 Reality Capture 등이 대표적으로 활용되고 있으며 이외에도 매우 다양한 소프트웨어들이 존재한다. 각 상용 소프트웨어들의 경우 무료 기능과 구독 라이센스 방식의 유료 기능이 결합된 경우가 많으며, 일부 테스트 데이터를 통해 각 소프트웨어의 기술을 확인해볼 수 있다.
Recap 소프트웨어는 이미지를 통해 Mesh를 생성하는 Photogrammetry 방식과 Laser Scan을 활용한 3D Mesh 정합 기능 두 가지를 모두 지원하고 있다. 각 최종 결과물은 3D Mesh 데이터외에도 Point Cloud로도 변환 가능하여 CAD 또는 BIM 과의 연계에도 뛰어나다.
Metashape는 Photogrammetry를 위한 전문 소프트웨어로 3D Mesh 생성 과정에서 Point Cloud 데이터를 자동으로 분류할 수 있는 기능을 지원하고 있다. 이를 통해 원하는 오브젝트 외에 불필요한 바위, 나무 등을 제거하고 깔끔한 모델링 데이터를 확보할 수 있다.
3DF Zephyr의 경우 50장 이하의 이미지 데이터까지 무료로 사용할 수 있는 것이 특징이다. UI 구성이 간편하여 초보자들도 활용하기에 편리하지만 고정밀의 모델링 데이터를 얻기에는 타 소프트웨어에 비해 성능면에서 다소 부족한 부분이 있다.
Reality Capture의 경우 다른 소프트웨어들에 비해 성능과 속도면에서 가장 뛰어나다는 평가를 받고 있다. 데이터 입력을 통한 최종 모델링 생성까지는 무료로 사용가능하지만 생성된 데이터의 외부 활용을 위해서는 유료 구독 플랜이 필요한 것이 특징이다.
국내에서도 자체 기술 확보를 통해 3D 스캔 관련 서비스들을 제공하려는 기업들의 노력이 이루어지고 있다. 엔젤스윙(AngelSwing)에서는 드론 촬영을 통해 생성된 현장의 모델링 데이터와 CAD 또는 BIM 데이터를 연동하여 클라우드 기반의 시공 및 안전관리 솔루션을 제공하고 있으며, 현재 국내 여러 기업에서 도입하여 활용 중에 있다. YeganIT에서는 ‘A.EYES’라는 자체 디지털 트윈 솔루션을 보유하고 있으며 2D, 360 이미지를 활용하여 고해상도의 공간 모델링 데이터를 생성하는 서비스를 지원하고 있다. Cupix에서는 360 카메라를 활용하여 파노라마 이미지를 촬영 후 이를 웹상에서 공간으로 구성하고, 각 시점마다 이동하며 확인할 수 있는 웹 뷰어 방식의 서비스를 제공하고 있다.
2.3.2 SLAM 관련 기술
현재 활용되고 있는 SLAM 관련 서비스들은 사람이 휴대용 장비를 들고 공간을 촬영하는 방식 또는 로봇에 센서를 부착 후 촬영하는 방식이 대표적이며 Lidar 또는 3D Camera 등의 장비가 주로 활용된다.
iPad에 Lidar 센서가 탑재된 이후로는 3D 스캔을 지원하는 앱들이 여럿 서비스되고 있으며, 대부분 해외에서 개발되어 운영되고 있다. 가장 대표적인 앱으로는 Scandy Pro, PolyCam, Scaniverse 등이 있으며 각 앱들이 모두 공간 촬영과 데이터 편집, 모델링 데이터 내보내기 등의 유사한 기능들을 지원하고 있다.
앱을 활용한 SLAM 방식에서는 실시간으로 촬영하는 공간 위에 Mesh 데이터가 증강되어 스캔 과정을 확인하기 쉽다는 장점이 있다. 하지만 사용자가 직접 돌아다니며 공간을 구석구석 촬영해야 하기 때문에 사용자에게 숙련도가 요구되며, 넓은 공간의 경우 스캔 작업으로 인한 피로도가 증가하는 단점이 있다.
국내 기업인 MAXST에서는 3D 카메라와 IMU 센서를 조합하여 모바일 환경에서 뛰어난 성능을 보이는 SLAM 솔루션을 보유하고 있으며, 이를 드론 또는 로봇과 함께 활용할 수는 서비스를 제공하고 있다.
Table 2.
3D scan software/service features analysis
2.3.3 Point Cloud 후처리 관련 기술
Point Cloud 후처리 방식에서는 Point Cloud 데이터를 얻을 수 있는 여러 장비가 사용 가능하며 고정밀 데이터를 얻기 위해 주로 3D 레이저 스캐너가 활용된다. 스캔 이후에는 특정 소프트웨어에 국한되지 않고 여러 소프트웨어를 활용하여 높은 퀄리티의 모델링 데이터를 얻을 수 있는 장점이 있다.
미국의 FARO와 Trimble은 대표적인 고정밀 스캔 서비스를 제공하는 기업으로 각각 FARO SCENE과 Trimble RealWorks와 같은 Point Cloud용 소프트웨어를 보유하고 있으며, 자사에서 개발한 3D 레이저 스캐너 장비를 함께 판매하여 3D 스캔 서비스를 제공하고 있다.
클라우드 기반의 3D 스캔 서비스를 제공하고 있는 Matterport는 3D 카메라인 Pro2 외에도 iPad, 360 카메라 등 여러 장비를 선택하여 공간 스캔이 가능하다. 360 파노라마 이미지와 3D 모델링 데이터, Point Cloud 등 원하는 포맷의 스캔 데이터를 얻을 수 있으며, 웹에서 전체 공간을 확인하고 공유 및 관리할 수 있는 기능들을 제공한다.
국내외의 3D 스캔 관련 서비스들을 조사한 결과 대부분 해외의 기술들이 주로 활용되고 있었으며, Photogrammetry 방식과 Point Cloud 후처리 방식의 경우 동일 소프트웨어에서 두 가지 방식을 모두 지원하는 형태가 많았다. 국내 서비스들의 경우 소프트웨어는 자체 개발을 통해 기술 확보를 하였더라도 장비는 해외의 제품을 사용하는 경우가 많아 장비와 소프트웨어를 모두 국내에서 제공하는 서비스는 찾기 어려웠다.
3. 현장 테스트를 통한 활용성 평가
건설현장에서 3D 스캔을 진행하는 경우 현장 상황과 소프트웨어에 따라서 여러 가지 변수가 존재한다. 이러한 변수들은 스캔 과정에서의 사용자의 편의성, 소요되는 시간, 최종 모델링의 퀄리티 등에 영향을 미치게 된다.
본 연구에서는 프로젝트 요구사항으로 일 단위의 빈번한 스캔 작업이 이루어져야 했기에 다음과 같은 조건들을 고려하여 현장 테스트를 진행하였다. 첫째, 스캔 작업부터 모델링 생성까지의 전체 작업이 빠르게 완료 가능한지, 둘째, 3D 모델링이 실제 현장을 구분 가능할 정도의 품질을 유지하며 외부 프로그램 환경에도 활용 가능한지, 셋째, 스캔 작업의 절차가 용이할 것.
이와 같은 기준을 조건으로 국내외의 각 스캔 기술들을 실내 공간과 실외 공간에서 현장 테스트를 진행하였다. 실내 공간으로는 사무실과 대학 강의실 공간 두 곳을 비교하였고, 실외 건설현장으로는 서울 양천구에 위치한 시립 청소년 음악센터 건립공사 현장에서 테스트를 진행하였다.
3.1 실내 공간 현장 테스트
실내 공간은 사무실과 강의실 두 곳에서 테스트를 진행하였다. 사무실 공간은 약 20평으로 문과 벽으로 가려진 부분이 존재하며 다양한 실내 오브젝트들이 존재한다. 강의실 공간은 약 12평이며 벽으로 가려진 공간이 없이 전부 개방되어있고, 유사한 형태의 오브젝트들이 다수 존재하는 특징이 있다.
3.1.1 오픈소스와 상용 소프트웨어 비교
오픈소스 소프트웨어와 상용 소프트웨어 사이의 기술 수준 차이를 확인하기 위해 현재 가장 널리 활용되고 있는 오픈소스 소프트웨어인 MeshRoom과 상용 소프트웨어 Reality Capture를 비교하였다. 두 소프트웨어 모두 Photogrammetry 방식을 기준으로 스캔 작업을 진행하고 테스트를 진행하였다.
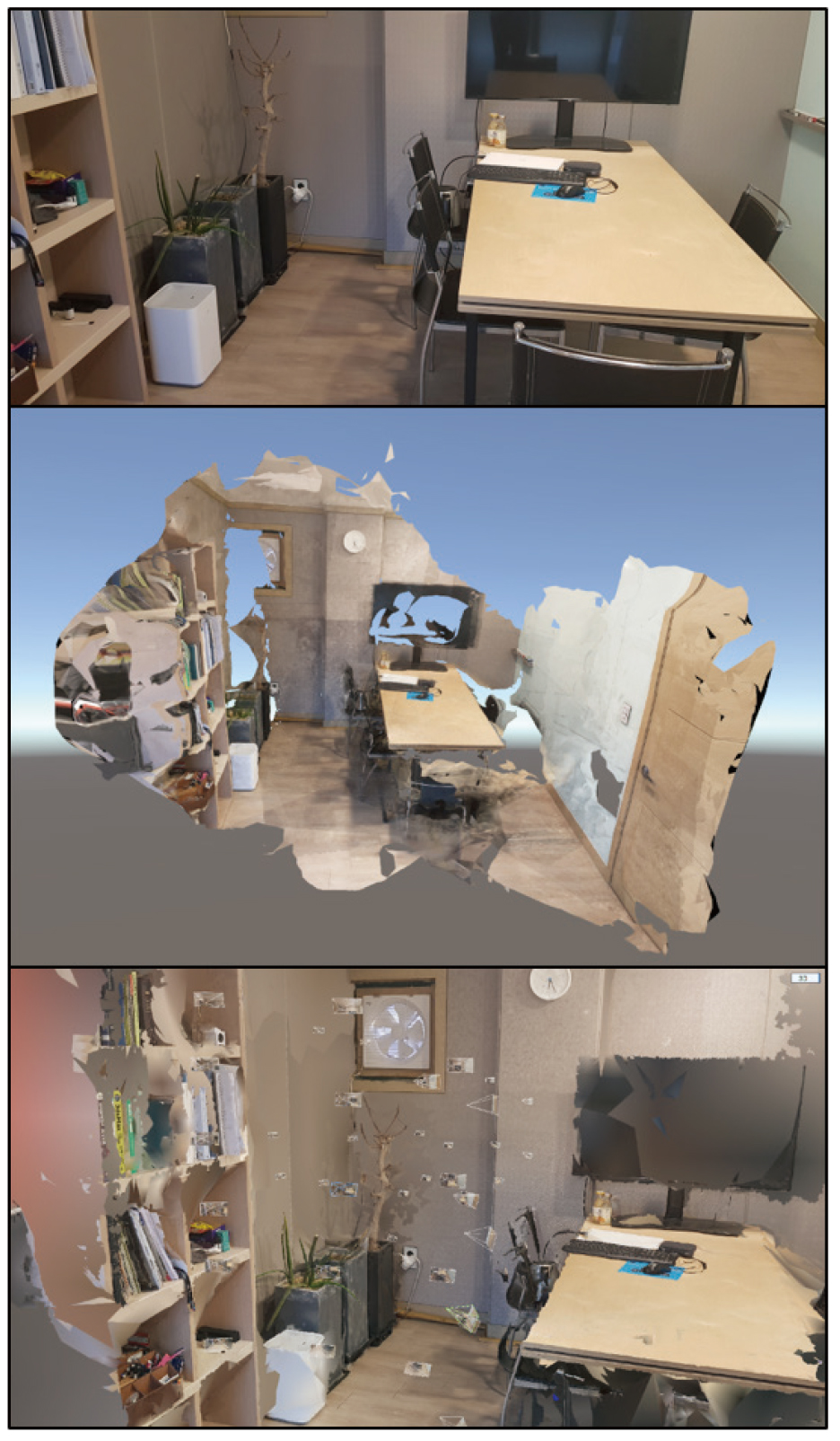
테스트에는 사무실 공간을 기준으로 Samsung Galaxy S21 스마트폰을 활용하여 50장의 이미지를 촬영하였다. 이후 동일한 50장의 이미지를 두 소프트웨어에서 3D 모델링으로 재구성한 다음 결과를 비교하였다.
먼저, 오픈소스 소프트웨어에서는 모델링 생성에 약 50분이 소요되었다. 모델링 생성 옵션을 조정하여 사용하는 알고리즘 종류와 변수 설정에 따라 계산 시간에 많은 차이는 있지만 퀄리티는 더 이상 개선되지 않음을 확인할 수 있었다. 특히 Mesh 구성에 실패하여 발생하는 빈 영역들이 지나치게 많이 존재하여 전반적으로 공간 구성에 문제가 있음이 확인되었고, 공간보다 단일 오브젝트의 모델링 재구성에 더 뛰어난 특징을 확인할 수 있었다.
이와 달리 상용 소프트웨어인 Reality Capture에서는 모델링 생성에 약 12분이 소요되어 크게 단축되었으며, 전체적으로 빈 공간이 많이 줄어들어 공간 구성에 더 뛰어난 결과를 보이는 점을 확인할 수 있었다. 하지만 두 소프트웨어 모두 Mesh 구성에 실패하여 구멍이 생기거나 뭉개지는 부분들이 다수 발생하였다. 따라서 오픈소스 소프트웨어의 경우 무료로 활용 가능한 장점이 있으나 모델링의 퀄리티가 낮아 공간 단위의 3D 스캔 작업에는 적합하지 않은 것으로 판단된다.
3.1.2 Photogrammetry 방식 실내현장 테스트
오픈소스 프로젝트와 상용 소프트웨어 간의 비교를 통해 상용 소프트웨어가 오픈소스에 비해 더 나은 결과를 보이는 것으로 확인되었다. 따라서 이후 각 기술의 테스트에서는 상용 소프트웨어들만 비교를 진행하기로 하였으며, 실내 공간에서 Photogrammetry 관련 서비스에 해당하는 Cupix, YeganIT, Matterport 3가지 기업의 기술을 테스트하였다.
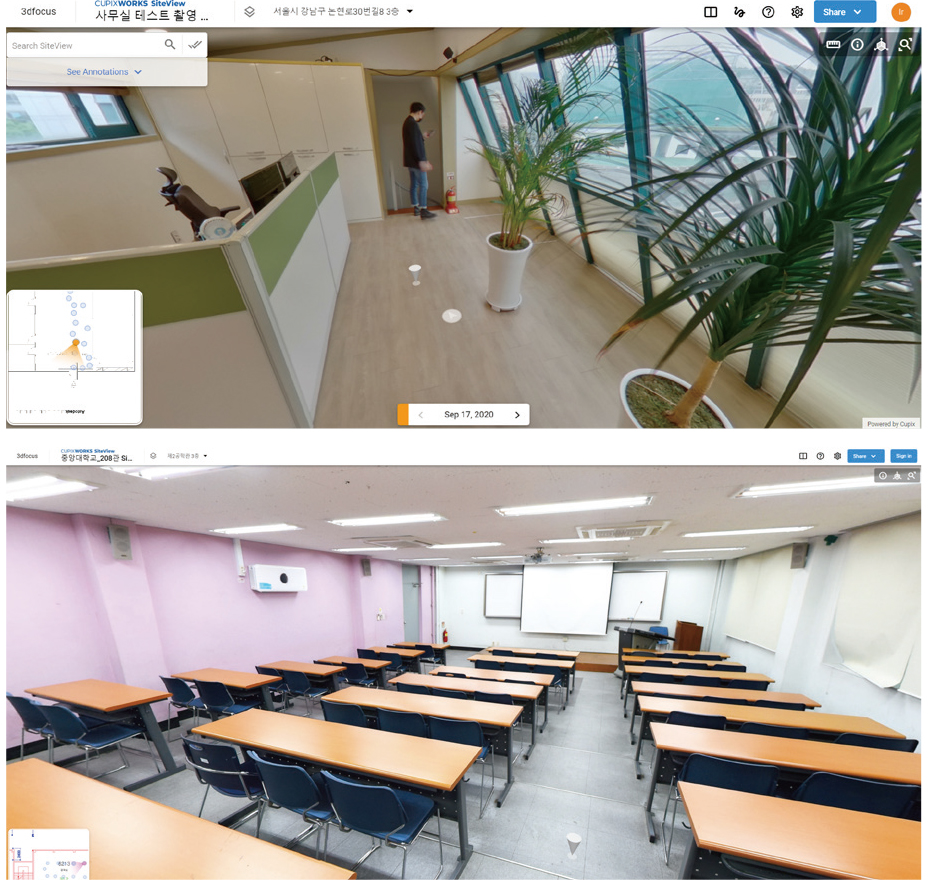
(1) Cupix
Cupix에서는 DSLR 카메라와 360 카메라 두 종류의 장비를 활용하여 촬영을 진행하였고, DSLR 이미지 약 15장과 360 파노라마 이미지 약 20장으로 공간 구성을 진행하였다.
촬영에 소요된 시간은 평균 15분, 공간 구성에 소요되는 시간은 약 1시간으로 비교적 빠른 시간 안에 3D 스캔 작업을 완료할 수 있었다. 작업 절차 또한 간편하며 강의실과 같이 개방된 공간의 경우 복잡한 공간에 비해 더욱 빠르게 진행이 가능하다. 다만 최종 결과물로 3D 모델링 데이터가 아닌 자체 솔루션을 통해 구성된 웹 링크를 제공하고 있기 때문에 사용자가 원하는 방식으로 수정하여 활용하기에 어려운 단점이 있다.
(2) YeganIT
YeganIT의 경우 싱글렌즈와 어안렌즈 카메라 두 종류를 사용하였으며, 어안렌즈 이미지 약 130장, 싱글렌즈 이미지 약 900장으로 공간 구성에 매우 많은 이미지가 활용된다.
3D 모델링 구성 작업에는 1차로 Agisoft의 Metashape 소프트웨어를 통해 3D 모델링을 생성하고 이후 자체 보유한 솔루션과 수작업으로 보정 및 최적화하는 작업을 거친다.
Metashape를 이용한 1차 공간 구성에는 약 3시간 이상이 소요되며, 이후 보정 및 최적화 등의 추가 작업에 40 ~ 50시간이 소요되어 하나의 공간 구성에 매우 오랜 시간이 소요된다.
최종 결과물의 경우 실제 공간과 동일한 수준의 매우 높은 퀄리티의 모델링 데이터를 얻을 수 있고, 3D 모델링 데이터와 웹 링크를 함께 제공하여 확장성이 뛰어나다는 장점이 있다.

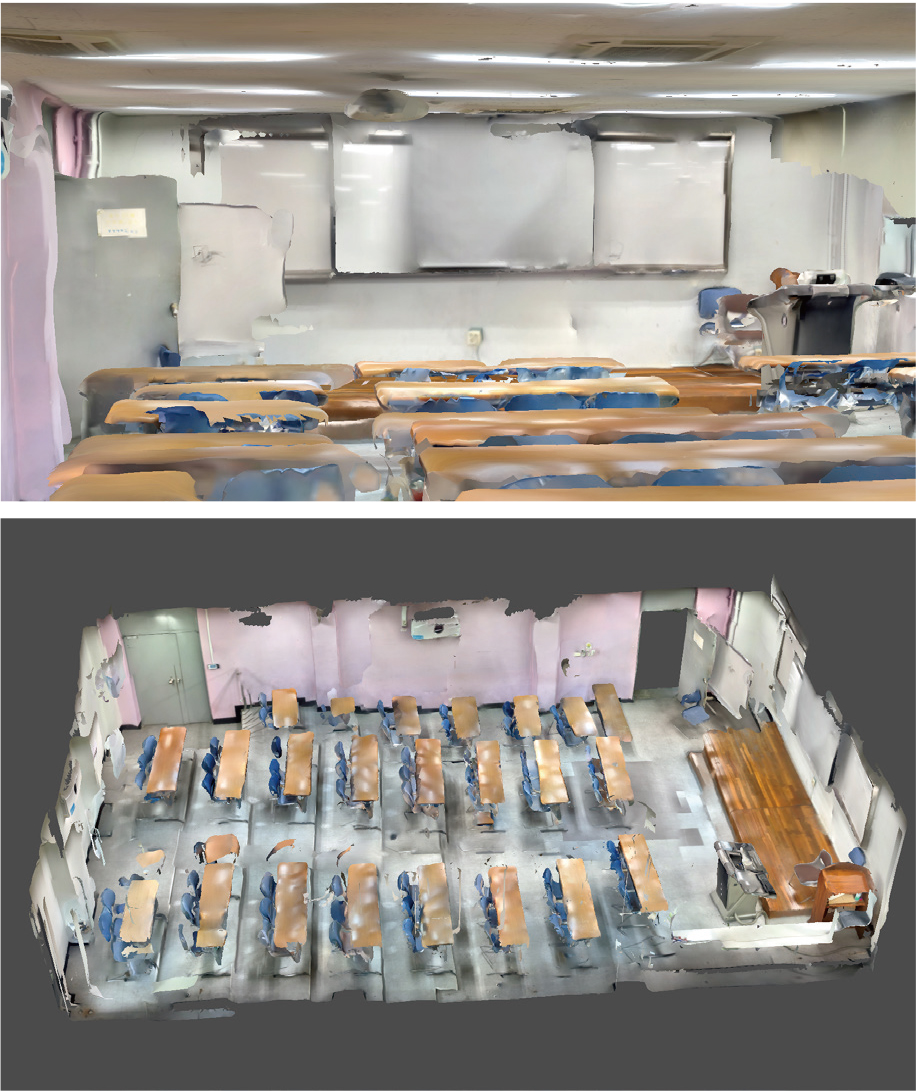
(3) Matterport
Matterport는 360 카메라와 고성능의 3D 카메라 등 여러 장비를 활용하여 3D 스캔 작업이 가능하다. 본 연구의 실내 공간의 테스트에는 360 카메라를 사용하였다.
스캔 작업은 Matterport 앱을 통해 촬영에 사용되는 장비와 스마트폰을 무선 통신으로 연결한 상태에서 촬영을 진행하고, 촬영된 데이터를 클라우드 서버로 업로드 하여 3D 모델링 데이터로 구성한다.
Matterport를 활용한 강의실 촬영에는 약 10분, 클라우드 서버 업로드와 데이터 처리에 약 25분이 소요되어 가장 빠르게 전체 작업을 완료할 수 있었다.
최종 모델링의 경우 빈 Mesh 공간의 발생 없이 전체적으로 공간 구성에 성공적인 것으로 확인되었다. 하지만 일부 오브젝트들이 뭉개지는 부분들이 있고, 아주 높은 퀄리티를 기대하기에는 어렵다는 한계가 있다.
360 이미지를 활용하여 공간 스캔부터 최종 모델링 생성까지의 작업 절차가 간편하고, 3D 모델링 데이터를 직접 추출하거나 웹 서비스를 통해 공간 공유와 편집 또한 지원하고 있어 활용도가 높다.
3가지 Photogrammetry 서비스를 비교한 결과 2D 이미지보다는 360 이미지를 활용하는 방식에서 더 빠르게 스캔 작업을 완료할 수 있는 것으로 확인되었다. 이미지가 늘어날수록 모델링 구성에 소요되는 시간이 크게 증가하는데 360 이미지의 경우 한 번에 넓은 범위를 스캔할 수 있고, 모델링 구성에 많은 이미지가 필요하지 않다는 장점이 있다. 360 이미지를 활용한 Cupix의 경우 스캔 작업과 모델링 구성이 간편하지만 3D 모델링 데이터를 직접 제공하지 않는 단점이 있으며, YeganIT의 서비스에서는 모델링 품질은 매우 이상적이나 모델링 구성에 지나치게 긴 시간이 소요되어 빈번한 스캔작업이 요구되는 환경에 적합하지 않은 것으로 판단된다. Matterport의 서비스에서는 모델링 품질은 다소 떨어지지만 전체적인 공간 구성에 성공하였으며 소요되는 시간 또한 짧아 프로젝트 요구사항에 가장 적합한 것으로 확인되었다.

3.1.3 SLAM 방식 실내현장 테스트
SLAM 방식의 테스트에는 Lidar 센서가 부착된 장비 iPad Pro 11형을 활용하였고, iOS 기반의 3D 스캐닝 앱 Scaniverse, Poly Cam, Scandy Pro 3가지를 통해 테스트를 진행하였다.
iPad를 활용한 스캔 작업에서는 사용자가 직접 돌아다니면서 전체 공간을 훑어가며 시작 지점부터 마지막 지점까지 이어지는 절차로 진행된다. 스캔 과정에서 실시간으로 Mesh가 생성되는 모습을 확인할 수 있기 때문에 잘못된 스캔으로 인한 실수를 줄일 수 있고, 스캔 범위를 파악하기 용이한 장점이 있다.
테스트에 활용된 3가지 앱 모두 유사한 스캔 작업 방식을 가지고 있으며, 모델링의 퀄리티 또한 큰 차이가 없었다. 스캔 작업 시간 또한 큰 차이가 없이 강의실 공간을 기준으로 스캔 작업에 약 15분, 모델링 생성에 약 4분 정도 소요되어 매우 빠른 시간 안에 3D 스캔 작업 완료가 가능하였다.
스캔이 완료된 공간은 앱 편집 기능을 통해 직접 모델링의 퀄리티를 조절하거나 불필요한 영역을 잘라내는 등의 작업을 수행할 수 있고, PLY 또는 OBJ 형식으로 모델링 데이터를 직접 얻을 수 있다.
3.1.4 Point Cloud 방식 실내현장 테스트
Point Cloud 방식의 테스트에는 기업 테라픽스에 의뢰하여 FARO Focus M70 레이저 스캐너 장비를 활용하였다.
고정밀의 데이터를 얻기 위해 높은 품질로 설정하여 스캔을 진행하였고, 한 포인트마다 약 10분의 스캔 시간이 소요되었다. 사무실 공간의 스캔에는 약 3시간 30분, 강의실 공간 스캔에는 약 2시간이 소요되었다. 이후 데이터의 필터링과 수작업을 통한 보정 작업을 거쳐 각각 20GB와 12GB 크기의 Point Cloud 데이터를 확보하였다.

Point Cloud 데이터의 3D 모델링 변환에는 Agi Metashape 소프트웨어를 활용하였다. 모델링 변환에 사용되는 옵션 설정에 따라 모델링 구성에 소요되는 시간과 모델링 품질이 많은 차이가 존재한다. 본 연구에서는 기본 설정 조건으로 진행하여 중간 품질의 모델링 구성을 진행하였으나 초기 데이터 로드에만 20분 이상, 모델링 구성에는 약 6시간 이상 소요될 정도로 모델링 변환에 많은 시간이 걸리는 점이 확인되었다.
Table 3.
Summary of indoor field test results
3.2 건설현장 테스트
실내 공간 위주의 테스트 이후 외부 환경요소의 영향을 많이 받는 건설현장에서 활용하였을 경우의 결과를 확인하기 위해 건설현장 테스트베드에서 테스트를 진행하였다. 테스트베드는 서울 양정구 신정동에 위치한 시립청소년 음악센터 현장으로 지하 1층과 지상 6층 규모의 시설이다.
테스트에 활용된 외부 공간은 햇빛에 노출되어 있으며 다양한 건설 자재들이 산적해 있고 철근 구조물이 많은 특징이 있다. 지하주차장 공간의 경우 빛이 잘 들지 않으며 어느 정도 공사가 진행된 상태로 기둥 구조물을 통한 구조 파악이 용이한 상태이다.
건설현장 테스트에는 앞선 실내 공간 테스트에서 좋은 성능을 보였던 Photogrammetry 방식과 SLAM 방식 위주로 진행하였으며 Point Cloud 방식은 촬영에 매우 긴 시간이 소요되어 제외하였다.
3.2.1 Photogrammetry 방식 건설현장 테스트
건설현장의 Photogrammetry 방식 테스트에는 스캔 작업의 소요 시간과 최종 모델링의 전반적인 퀄리티 모두 좋은 결과를 보였던 Matterport를 중점적으로 테스트를 진행하였다.
스캔에 사용된 장비는 360 이미지 기반의 RICOH THETHA Z1과 3D 카메라 Matterprot Pro2로 구분하여 장비에 따른 스캔 작업의 차이를 비교하였다.
개방된 실외 현장 테스트에서 스캔 시간이 Z1 장비로 약 20분, Pro2 장비로 약 30분 소요되었으며 모델링 생성에 소요된 시간은 모두 90분 정도로 비슷하게 소요되었다.
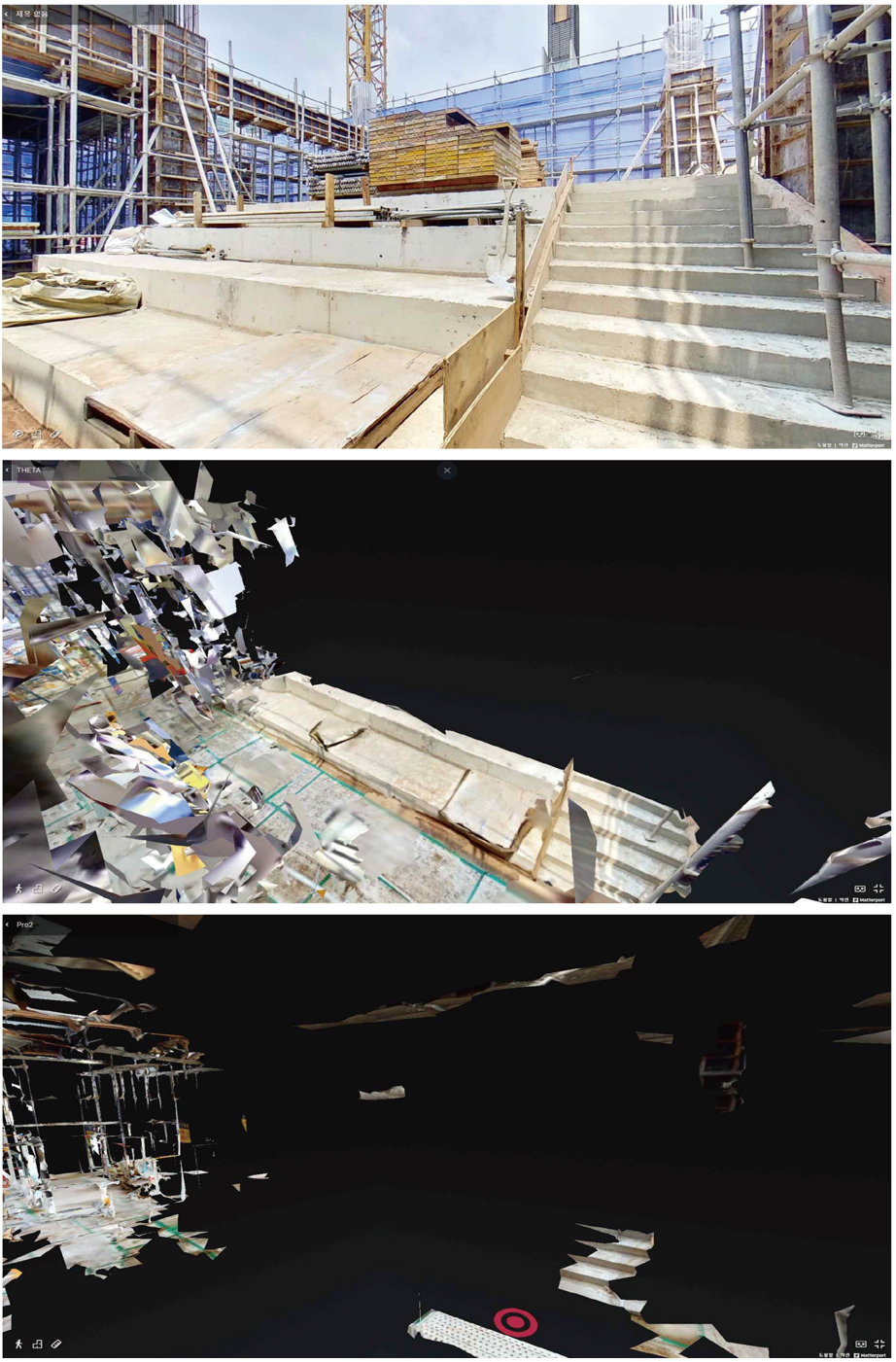
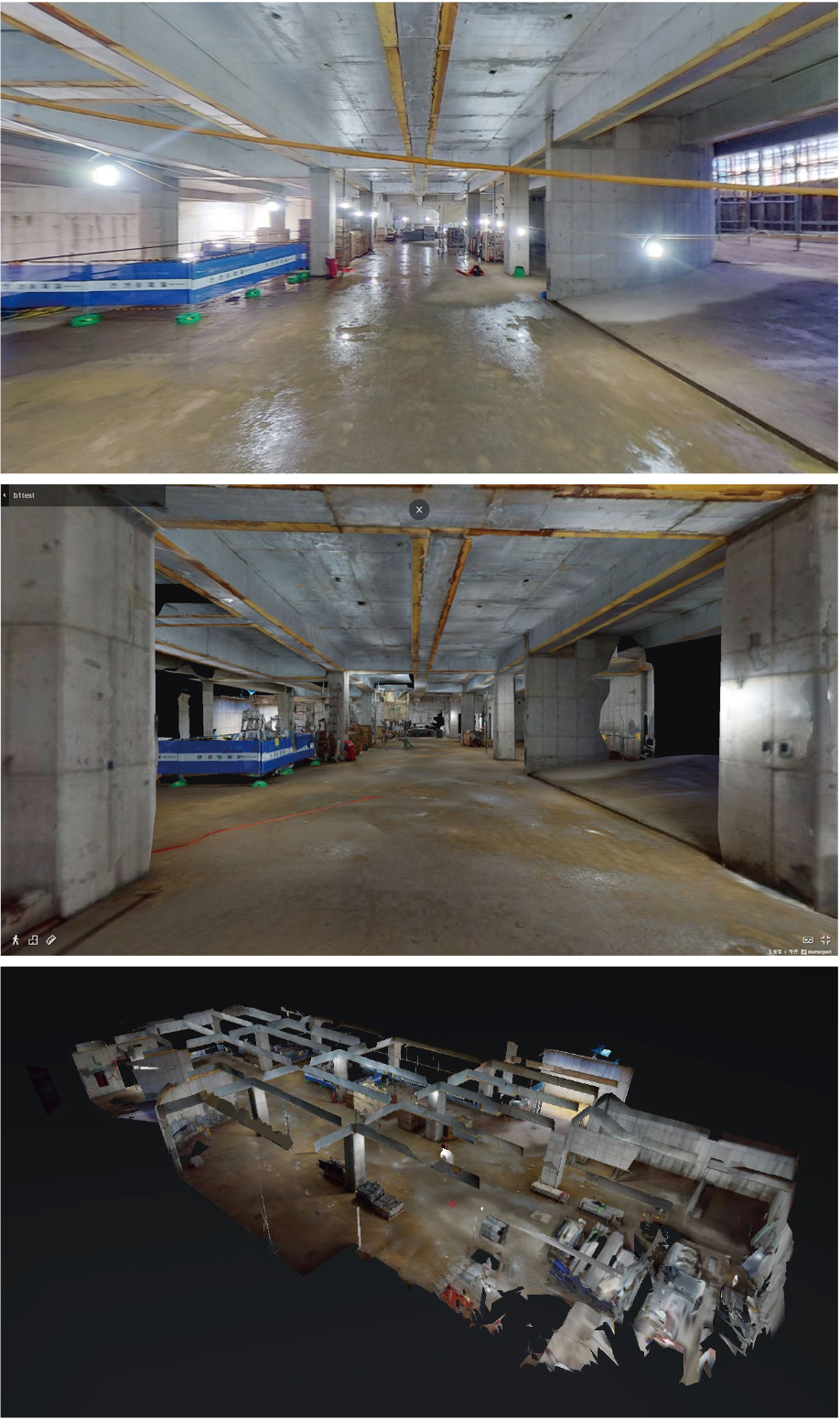
어두운 지하주차장 공간에서는 Z1 장비로 약 40분, Pro2 장비로 약 1시간이 소요되었고, 모델링 생성에는 모두 2시간 이상 소요되었다.
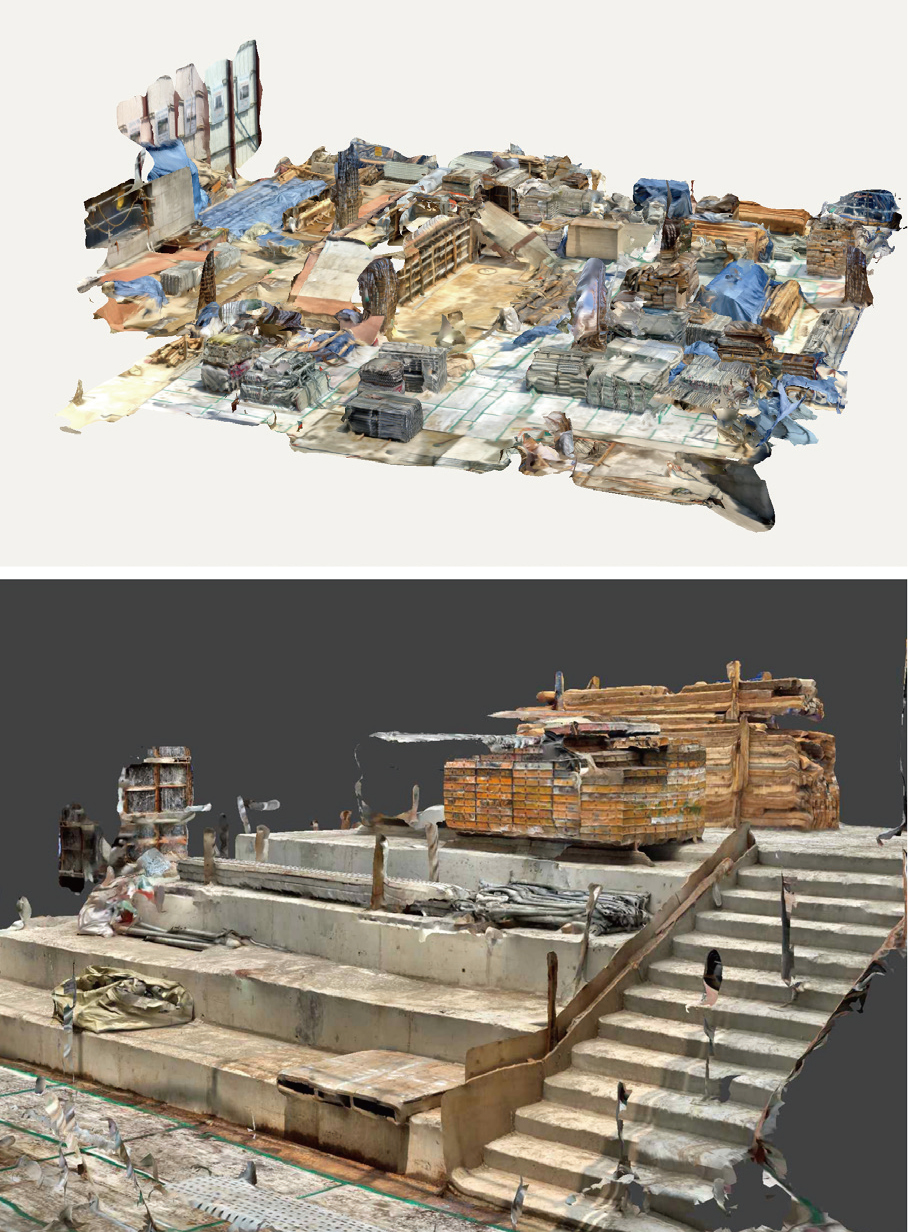
두 장비 모두 한 번에 넓은 영역을 스캔할 수 있어 스캔 작업은 편리하였으나 Figure 11과 같이 실외 환경에서는 빛의 영향을 많이 받게 되고, 그로 인해 Z1과 Pro2 모두 전반적으로 Mesh 구성에 실패한 것을 확인할 수 있었다. 이와 달리 빛의 영향을 덜 받는 지하주차장 공간에서는 실제 공간과 거의 유사한 수준으로 모델링 생성이 가능하였다. 특히 3D 카메라인 Pro2를 활용한 경우 Z1 카메라에 비해 해당 공간의 자세한 특징들과 함께 전반적인 공간 구성까지 훨씬 더 나은 결과를 보이는 것으로 확인되었다.
3.2.2 SLAM 방식 건설현장 테스트
SLAM 방식에서는 Poly Cam과 Scaniverse 두 종류의 앱을 활용하여 테스트하였다.
개방된 실외 현장의 스캔을 위해 외곽에서부터 시작해 중심부로 이어지는 순서로 이동하며 스캔을 진행하였다.
Poly Cam의 스캔 작업에 약 50분, 모델링 생성에는 약 5분이 소요되었고, Scaniverse의 경우 스캔 작업에 약 35분, 모델링 생성에 약 5분이 소요되었다.
복잡한 건설현장 구조로 인해 이동시간이 늘어나 스캔 작업에 많은 시간이 소요되었으나 모델링 구성은 매우 빠르게 완료할 수 있었다. 또한, Photogrammetry 방식과 달리 빛의 영향을 많이 받는 외부 환경에서도 모델링 구성에 성공적이였으며, 퀄리티가 떨어지는 부분은 iPad에서 동작하는 소프트웨어 성능에 차이가 있기 때문인 것으로 추정된다.
3.3 테스트 결과 종합 분석
실내 공간은 태양광이나 외부 환경의 영향을 덜 받아 일정한 밝기가 유지되는 상태이며, 이와 같은 조건에서는 3가지 스캔 방식 모두 성공적으로 3D 모델링의 구성이 가능하였다.
실내 공간의 테스트에서는 문으로 가려진 부분이 존재하는 공간과 전부 개방된 공간으로 구분하여 테스트를 진행하는데 이를 통해 가려진 공간이 많을수록 스캔에 소요되는 시간이 길어지며, 작업 절차가 복잡해지는 것을 확인할 수 있었다. 이러한 차이는 Photogrammetry 방식에서 더욱 커지며 360 이미지보다 2D 이미지를 활용하는 비중이 큰 경우 스캔 시간이 훨씬 더 많이 증가하였다.
Table 4의 실내 테스트 결과를 보면 스캔 시간이 가장 빠른 방식은 SLAM 방식과 360 이미지를 활용하는 Photogrammetry 방식인 것을 알 수 있다. 스캔 이후 모델링 생성에 소요되는 전체 시간은 SLAM 방식이 더 빠르나 Figure 8과 Figure 9를 비교하면 비슷한 시간이 소요됨에도 불구하고 Matterport의 모델링의 퀄리티가 더 뛰어난 결과를 확인할 수 있었다. 이를 통해 실내 환경의 경우 Photogrammetry 방식으로도 충분히 빠르게 높은 품질의 모델링 데이터를 얻을 수 있음이 증명된다. 다만 SLAM 방식의 품질이 더 떨어지는 이유에는 본 연구에 활용된 SLAM 방식에서 모델링을 구성하는데 컴퓨터가 아닌 iPad를 사용하였기에 하드웨어 및 소프트웨어의 성능 차이로 존재하기 때문인 것으로 판단된다. 동일한 컴퓨팅 성능이라면 SLAM 방식에서 더 빠르게 높은 품질의 모델링 데이터 확보가 가능할 것이다.
Table 4.
Summary of outdoor field test results
Point Cloud 방식에서는 각 포인트마다 소요되는 스캔 시간이 10분이고 전체 공간이 복잡할수록 매우 오랜 시간이 걸려 시간적인 제약이 있는 환경에서는 적합하지 않은 것으로 판단된다. 하지만 한번 스캔 작업이 완료된 이후에는 실제 공간과 아주 유사한 공간 데이터를 확보할 수 있어 빈번한 스캔 작업이 필요하지 않고, 정밀한 모델링 데이터가 필요한 경우에 적합한 방식에 해당한다.
태양광의 영향을 받는 실외 현장에서는 Figure 11과 같이 이미지를 주로 사용하는 Photogrammetry 방식의 경우 모델링 구성에 거의 성공하지 못하였음을 알 수 있다. 이와 달리 Figure 13의 Lidar를 활용한 방식에서는 모델링이 뭉개지는 단점은 있으나 전반적으로 구조물의 상태를 확인할 수 있을 만큼 모델링 구성에 성공적인 것을 알 수 있다. 따라서 빛의 영향을 많이 받는 환경에서는 이미지를 주로 활용하는 Photogrammetry 방식은 적합하지 않으며, SLAM 또는 Point Cloud 방식이 더 나은 성능을 보일 것으로 판단된다. 다만 SLAM 방식에서는 센서와 함께 직접 이동해야 하기 때문에 공간이 크고 복잡할수록 스캔 시간이 길어져 편의성이 떨어지며, 지속적으로 오차 데이터가 누적되어 모델링의 일부 공간이 어긋나는 문제점이 있다. 또한, 건설현장의 경우 건설 자재들이 사방에 흩어져 있어 사용자가 직접 돌아다닐 경우 위험에 노출될 수 있는데 로봇 또는 드론과 함께 활용하는 경우 스캔 절차의 편의성이 개선되고 안정성 문제 또한 해결할 수 있다.
Figure 12에서는 태양광의 영향을 받지 않는 환경의 경우 Photogrammetry 방식으로도 높은 퀄리티의 3D 모델링 데이터를 얻을 수 있음이 증명된다. 따라서 3D 스캔을 진행하는 경우 해당 공간의 환경요소를 고려하여 적합한 3D 스캔 방식을 선정해야하며, 다른 Photogrammetry 서비스들과의 비교를 통해 알 수 있듯이 동일한 방식 내에서도 활용하는 데이터와 소프트웨어 및 장비에 따라 모델링의 품질과 소요되는 시간에 매우 큰 차이가 존재하는 점이 확인되었다.
4. 결론
본 연구에서는 국내외 3D 스캔 관련 소프트웨어와 서비스들을 조사하고 사용자의 입장에서 비슷한 기술구조와 활용 방식에 따라 3가지로 분류하였다. 3D 스캔 기술들은 동일한 소프트웨어라도 활용하는 장비에 따라 스캔 퀄리티가 달라지며, 활용 가능한 기술들의 종류와 장비의 조합이 다양하기에 초기에 스캔 작업의 진행시 어떤 방식이 적합한지 알기 어렵다는 문제가 있다. 이에, 국내외에서 주로 활용되는 3D 스캔 서비스들을 선정 후 직접 실내 공간과 건설현장에서 테스트를 진행하였다.
실내 공간의 테스트에서는 Photogrammetry, SLAM, Point Cloud 방식 모두 공간 모델링 구성에 성공적인 것을 확인하였다. 사용자 편의성에 있어서 Photogrammetry 방식은 2D 이미지를 활용하는 경우와 360 이미지를 활용하는 경우의 작업 시간 차이가 매우 크게 나타났으며, 사용자가 직접 여러 장의 이미지를 찍어야하는 2D 이미지 방식은 공간이 넓은 건설현장보다 크기가 작은 실내 공간에 더 적합할 것으로 판단된다.
SLAM 방식 또한 스캔 작업에 소요되는 시간이 적고 모델링 구성이 빠른 장점이 있으나, 전체 공간을 사용자가 직접 이동하며 스캔을 진행하기 때문에 건설현장에서 활용하기에 편의성이 떨어지고 사용자가 위험에 노출될 수 있는 단점이 있다. 또한, 공간이 커서 스캔 시간이 길어질수록 누적되는 오차가 커지는데 이로 인해 공간 모델링이 어긋나는 문제점이 존재한다.
Point Cloud 데이터의 후처리 방식에서는 스캔 작업에 매우 긴 시간이 소요되는 단점을 제외하면 가장 높은 퀄리티의 모델링 데이터를 얻는 것이 가능하다. 따라서 시간적인 제약이 없거나 높은 퀄리티가 필요한 경우에 적합한 스캔 방식이다.
실외 건설현장의 테스트에서 360 이미지 방식과 3D 카메라를 활용하는 방식 모두 공간 구성에 실패하였고, Photogrammetry 방식이 빛의 영향을 매우 크게 받는 것을 알 수 있었다. 따라서 외부 빛에 노출된 환경에서는 이미지보다는 Lidar 기반의 장비를 활용하여 Point Cloud 데이터를 얻을 수 있는 스캔 방식 더 적합하다. 이후 Point Cloud 데이터의 후처리 방식 또는 모델링 퀄리티를 향상 시킬 수 있는 소프트웨어를 활용한다면 휴대형 SLAM 방식에서의 낮은 퀄리티 문제를 보완할 수 있을 것으로 판단된다.
본 연구에서는 빈번한 현장 스캔 작업이 요구되어 빠르게 모델링 구성이 이루어져야 하는 시간적인 제약이 존재하여 모델링의 품질이 다소 떨어지더라도 작업 편의성과 모델링의 구성 시간에 초점을 두었다. 시간적인 제약이 없는 경우라면 Photogrammetry 방식으로도 매우 높은 품질의 모델링을 확보할 수 있음이 확인되었기에 3D 스캔 방식의 선정시 현장의 환경요소와 시간적 제약 등을 고려하여 효율적인 방식을 고르는 것이 중요하다.
