

1. 서론
2. 건설 모니터링에 대한 고찰
3. 이론적 고찰
3.1 PointNet 알고리즘
3.2 DGCNN 알고리즘
3.3 ICP 알고리즘 PCD 정합 방법
4. 건설 모니터링을 위한 정합 방법
4.1 실험 방법
4.2 설계모델의 일정 및 WBS 입력
4.3 설계모델의 PCD 생성
4.4 설계모델과 현장의 진척도 비교
4.5 DGCNN 알고리즘 적용 및 부재 분석
4.6 부재 분석 결과물의 일정 활용
5. 사례 적용 결과
5.1 DGCNN 알고리즘 학습 검증 결과
5.2 일정 및 WBS 입력
5.3 공사 시점 설계모델 제작
5.4 두 PCD의 진척도 분석 및 비교
5.5 추출된 PCD 분할 및 정규화
5.6 DGCNN을 사용한 PCD 부재 분석
5.7 부재 분석 결과 기반 일정 변경
6. 결론
1. 서론
전통적인 건설 모니터링 방법은 인적 오류가 발생하기 쉽고, 모니터링 및 의사결정에 오랜 시간이 걸려 비효율적이다(Kavaliauskas et al., 2022). 또한 최근 수십 년 동안 건설 프로젝트의 50% 이상이 일정에 뒤처지고, 65% 이상이 비용 초과를 경험함에 따라 건설 프로젝트의 효율적이고 정확한 진행 상황 모니터링에 대한 필요성이 증가하고 있다(Mirzaei et al., 2022). 이에 따라 건설 프로젝트의 진행 상황에 대한 정확한 일정과 정보를 사용하는 것에도 관심이 증가하고 있다(Pucko et al., 2018). 하지만 전통적인 건설 모니터링 방법은 인적 오류가 발생하기 쉽고, 모니터링 및 의사결정에 오랜 시간이 걸려 비효율적이다(Kavaliauskas et al., 2022). 건설 프로젝트 관리는 정확한 일정에 대한 진행 측정이 필요하고, 진행 측정의 정확도를 높이기 위해 자세한 진행 정보를 수집하여 자동으로 관리해야 할 필요가 있다(Kim et al., 2020).
이러한 영향으로 최근 드론 및 레이저 스캐너 등과 같은 첨단 실측 장비를 통해 건설 시설물 및 현장 상황을 관측하는 적용 시도가 증대하고 있고, 이러한 장비를 통해 얻은 현장 데이터를 기반으로 다양한 활용이 늘어나고 있다(Jung et al., 2019). 그리하여 기존의 2차원에서 BIM (Building Information Modeling) 도입으로 인해 3차원을 주로 사용하게 되면서 드론 및 레이저 스캐너로 추출한 PCD (Point Cloud Data)를 BIM 적용단계에 다양하게 활용하고 있다(Park & Um, 2023). 또한 BIM 적용에 다양한 활용이 가능한 PCD (Point Cloud Data)를 드론 및 레이저 스캐너로 추출하여 사용한다(Park & Um, 2023). 그중 건설 모니터링에서 취득한 PCD와 BIM모델을 통합하여 부재를 식별하는 연구가 존재한다. 그러나 BIM 모델과 PCD는 형식이 다르기 때문에 통합 과정에서 부정확한 결과가 도출될 수 있고, 통합 과정에서 많은 시간이 소요될 뿐만 아니라 복잡하다는 문제가 있다(Bosché et al., 2014; Kim et al., 2019). 그리하여 BIM 기술이 발전했음에도 건설 중 실제 시공 조건을 반영하기 위해 모델의 업데이트를 할 때 많은 노동력과 시간이 소요되며, 건설 진행 상황 모니터링 및 보고는 많이 실현되지 않고 있는 문제가 있다(Sheik et al., 2023).
또한 건설 모니터링을 위해 현장에서 취득한 PCD는 추가적인 정보 없이 하나의 PCD로 생성되기 때문에 전체 PCD에 의미적 세분화를 적용하여 부재를 파악할 수 있지만, 정확도가 낮거나 부재를 잘못 인식하는 문제가 존재했다(Lee et al., 2024; Park et al., 2021). 그리하여 건설 모니터링으로 얻은 PCD는 의미적 세분화가 아닌 다른 방법으로 더 정확한 정보를 얻기 위한 연구가 필요하다.
따라서 본 연구는 프로젝트 모니터링을 진행할 때 기존의 설계모델에서 IFC (Industry Foundation Classes)와 GUID (Globally Unique Identifier)를 기반으로 생성한 PCD와 취득된 현장 건물의 PCD를 정합하고 진척도를 파악하여 차이가 발생한 부분을 추출한다. 그리고 추출된 PCD를 개별 부재로 분할하고 DGCNN (Deep Graph Convolutional Neural Network) 알고리즘 모델을 사용하여 Classification으로 각 부재를 파악한다. 마지막으로 파악된 부재를 활용하여 일정을 수정하고 설계모델에 반영하는 방안을 제시하고자 한다.
본 연구는 같은 형식의 PCD Data를 사용하므로 간편하게 설계모델과 현장 건물의 PCD를 정렬 및 정합할 수 있으며, 진척도의 확인 및 부재의 인식 정확도를 개선시킬 수 있다. 또한 공통된 데이터를 사용하여 진척도의 일관적인 분석 및 설계모델의 일정정보 수정 결과를 자동으로 처리할 수 있다.
2. 건설 모니터링에 대한 고찰
국내·외에서는 스마트 장비를 이용하여 현장의 정보를 취득하고 BIM 모델과 PCD를 통합하여 건설 진행 프로세스 및 프로젝트 관리를 개선할 수 있는 방법을 찾는 연구들이 이루어지고 있다.
Kim et al. (2013)은 건설 모니터링의 정확한 진행 측정을 위해 현장에서 취득한 PCD를 BIM 모델과 통합하여 요소를 파악했으며, 불완전한 3D 데이터 세트의 결과로 부정확할 수 있는 문제를 방지하기 위해 2단계 수정을 수행하였다. Han & Golparvar-Fard (2015)는 건설 진행 편차의 모니터링을 하기 위해 BIM과 사진을 사용한 새로운 외관 기반 재료 분류 방법을 제시하였고, PCD와 BIM 모델을 정렬한 후 다중 SVM (Support Vector Machine) 분류기를 사용하여 검증하였다. Kim et al. (2024)는 건설 산업에 스마트 기술을 도입하여 건설 관리를 하기 위해 스마트 장비를 사용하여 PCD 추출 및 생성하였고, BIM 모델에서 구조 부재의 위치 좌표 데이터를 사용하여 BIM 모델과 PCD를 통합하여 수량을 확인하였다.
Bassier et al. (2020)은 건설 현장 및 진행 모니터링에서 실패비용을 개선하기 위해 건설 현장에서 발생하는 드리프트를 고려하고 PCD와 BIM 모델에 정합 알고리즘을 사용하여 통합하는 새로운 메트릭품질 평가 방법을 연구하였다. Kim et al. (2019)는 구조 분석을 위한 BIM과 PCD의 정렬에서 복잡성을 해결하기 위해 SCAN-BIM 알고리즘을 사용하여 BIM 모델과 PCD를 통합하였으며, As-Built BIM 모델을 생성하여 구조를 분석하는 연구를 진행하였다.
이러한 연구의 한계점은 건설 모니터링의 개선을 위해 부재를 식별 및 분류하는 연구를 할 때 형식이 다른 BIM 모델과 PCD를 통합하기 위해 복잡한 작업이 필요하였고 시간이 많이 소요되었다.
스마트 장비와 스마트 기술을 사용하여 건물의 PCD를 추출하였을 때 개별 부재를 판단하고 정보를 파악하는 연구는 다음과 같다.
Lee et al. (2024)는 BIM의 교량 부재를 분류하고 형상 정보를 매개변수로 설정하여 교량을 새로 제작한 후 PCD로 추출하였다. 그리고 Point-Net 알고리즘을 통해 개별 부재의 분할을 검증하였다. 그러나 교각의 경우 57.4%, 상부 구조의 경우 88.9%, 베어링의 경우 42.7%, 교대의 경우 74.2%의 정확도를 달성하였으며 특히 교좌장치의 경우 낮은 인식률을 보였다. Park et al. (2021)은 이미지를 얻고 딥러닝을 통해 교량 구성 요소를 자동으로 분류하였으며, 요소에 대한 정보를 보존하면서 PCD 모델을 생성하는 SSfM (Semantic Structure from Motion)을 개발하였다. 그러나 거더, 교각, 배경을 요소로 설정하여 검증했을 때 평균 정밀도는 약 74%, IoU는 65%로 정확도가 부족하였다.
Vassena et al. (2023)은 PCD와 파노라마 이미지를 취득할 수 있는 모바일 매핑 장치를 사용하여 주기적인 측정 결과와 4D BIM을 결합하고 건설 작업 진행 상황을 모니터링하는 방법을 연구하였다. 하지만 검증 단계에서 데이터 분석을 했을 때 PCD의 객체 의미 부족으로 인해 모니터링에서 오류를 일으킬 수 있다는 한계점이 존재하였다. Ryu et al. (2020)은 평면 내부 객체의 위상적 특징을 사용하여 주요 구조 부재를 검출하고 3차원 기하학적 표현을 생성할 수 있는 새로운 알고리즘을 연구하였다. 그러나 창문, 문 같은 객체의 크기와 위치는 정확하게 파악하기 어렵다는 한계가 존재했다. Kavaliauskas et al. (2022)는 IFC 기반 BIM 모델 객체의 정점에서 점을 추출하여 포인트 클라우드와 BIM 데이터 통합하고 모니터링을 수행하는 방법을 연구하였다. 그러나 크기가 작은 객체는 PCD가 존재하지 않아서 객체의 누락이 일부 발생하였다.
기존 연구의 한계점으로는 건설 진행 프로세스 및 프로젝트 관리를 개선하기 위해 BIM 모델과 현장에서 추출한 PCD를 사용하여 형식이 다른 두 Data를 통합하는 연구의 사례가 대부분이다. 그리고 스마트 장비와 스마트 기술을 사용하여 건물의 PCD를 추출하고 건물 PCD를 구성하는 개별 부재를 판단할 때 정확도 및 인식의 문제와 Point의 부족으로 인한 인식의 문제가 발생하는 한계가 존재하였다.
따라서 본 연구는 이러한 한계점을 개선하기 위해 기존의 설계모델에서 각 부재의 IFC와 GUID를 활용하여 설계모델을 PCD의 형태로 생성한다. 이때 Segmantaion의 기능을 대신하기 위해 각 요소에 색을 지정하고 현장에서 추출된 PCD를 설계모델의 PCD와 나열하여 진척도를 확인한다. 비교 후 추출된 PCD를 일정에 맞게 분할하고 DGCNN 알고리즘 모델을 적용하여 검증한다. 이러한 방법은 진행되지 않은 개별 부재를 Classification으로 파악하여 기존의 연구 방법보다 정확도를 높일 수 있다. 마지막으로 파악된 부재를 활용하여 일정을 자동으로 수정하고 BIM에 적용하는 방안을 제시하고자 한다.
3. 이론적 고찰
3.1 PointNet 알고리즘
PointNet은 PCD를 Voxel grid 형태로 만들지 않고, PointCloud의 형태에서 특징을 추출하고 처리할 수 있도록 설계된 딥러닝 알고리즘이다. 그리고 x, y, z 좌표로 구성된 3차원의 PCD에서 Point를 독립적으로 특징과 패턴을 인식하여 복셀화와 기타 전처리 과정이 없이 분류했기 때문에 정확도가 높다. 그러나 PointNet은 각 점을 독립적으로 학습하기 때문에 점 간의 상호작용과 상대적인 위치정보가 고려되지 않아서 구조적인 특징이 충분히 반영되지 못하고, Local Structure를 학습하는데 한계가 존재하여 3D 물체의 세부 형상과 복잡한 구조를 파악할 때 성능의 한계가 존재한다(Charles et al., 2017).
3.2 DGCNN 알고리즘
설계모델의 PCD와 현장 건물의 PCD를 비교한 후 추출된 PCD에 존재하는 요소를 판별하기 위해 DGCNN 알고리즘을 적용한다.
기존의 PCD를 인식하는 딥러닝 알고리즘은 점들 사이의 기하학적 관계를 무시하여 지역적인 특징을 찾지 못하는 단점을 가지고 있다. 그리하여 DGCNN 알고리즘은 이러한 단점을 개선하기 위해 permutation invarance를 유지하며 point간의 local feature를 학습하고 layer 간 그래프를 동적으로 업데이트하며 EdgeConv를 통해 각 점과 점 간의 관계를 잘 반영할 수 있고 PCD의 다양한 패턴을 유연하게 학습할 수 있다(Wang et al., 2019).
DGCNN 알고리즘은 학습 단계마다 점 간의 이웃 관계를 동적으로 학습하고 PCD를 Graph의 형태로 표현하여 CNN의 개념을 그래프에 적용하는 알고리즘이다. 이때 각 점은 그래프의 노드가 되고 점과 점을 연결하는 선은 공간적 관계를 나타내는 엣지로 표현된다.
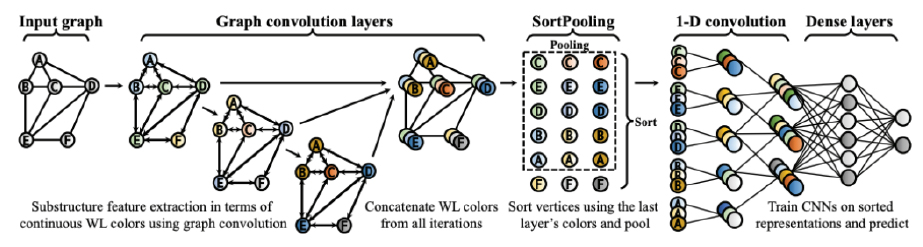
이러한 DGCNN 알고리즘의 과정은 Fig. 1과 같다. Graph Convolution Layers에서 EdgeConv 방법으로 각 점과 점의 관계를 동적으로 파악하고 중요한 지역적 구조를 학습하며 점을 노드로 표현하고, 노드를 연결하여 그래프를 형성한다. 그리고 SortPooling Layer에서 이전 단계의 추출된 정보를 정렬하여 일관된 크기의 데이터로 변환한다. 이후 1-D Convolution에서 정렬된 정보를 1차원 합성곱 계층에 입력하여 각 노드 사이의 특징을 학습하고, 중요한 패턴을 발견한다. 이후 Dense Layers에서 합성곱 계층의 출력을 완전 연결 계층에 전달하여 분류나 예측 등의 최종 결과를 출력한다.
3.3 ICP 알고리즘 PCD 정합 방법
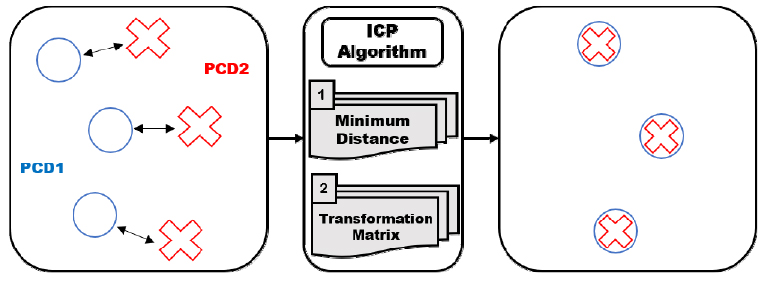
본 논문은 설계모델의 PCD와 현장 건물의 PCD를 비교하여 진척도 차이를 파악하기 위해 두 PCD 모델을 정합하는 과정이 필요하다. 따라서 두 PCD 모델을 정렬하기 위해 ICP(Iterative Closest Point) 알고리즘을 사용한다. ICP 알고리즘은 서로 다른 두 개의 PCD를 정합시키는 대표적인 알고리즘이다. Fig. 2와 같이 서로 다른 두 PCD에 ICP 알고리즘을 적용하여 초기 정렬 단계를 거친 후 가장 가까운 점을 찾고 두 PCD의 오차를 기반으로 변환 행렬을 계산하여서 두 PCD를 정확히 정렬한다.
4. 건설 모니터링을 위한 정합 방법
4.1 실험 방법
연구에 적용한 설계와 현장의 PCD 기반 진척도 비교 및 부재 탐지 일정 수정 방법은 Fig. 3과 같다. 첫 번째로 설계모델에 일정 정보를 연동하기 위해 개별 부재를 일정 단위로 맞추고 Dynamo를 통해 WBS(Work Breakdown Structure)와 일정을 속성에 추가한다. 그리고 설계모델을 PCD 모델로 변환할 때 IFC 형식의 모델과 GUID를 사용하기 위해 일정 단위로 맞춘 개별 부재들의 GUID를 추출하는 노드를 제작한다. 다음으로 현장의 제작 중인 건물과 설계모델의 진척도를 비교하기 위해 계획된 날짜를 기반으로 설계모델을 변형하기 위해 설계모델을 검사날짜에 맞게 변형한다.
두 번째로 변형된 설계모델에 GUID를 추출하는 노드를 사용하여 GUID를 Excel에 저장하고 개별 부재를 IFC 형식으로 저장한다. 그리고 추출된 개별 IFC 모델과 GUID를 기반으로 PCD를 생성하고여 각 요소의 분류가 쉽도록 색을 지정한다. 다음으로 개별 부재들의 PCD를 하나로 통합된 설계 PCD 모델을 제작한다. 개별 부재들의 PCD는 IFC와 GUID를 사용하여 생성되기 때문에 위치정보와 방향 정보가 내장되어 있어 추가 작업 없이 설계 PCD 모델을 제작할 수 있다.
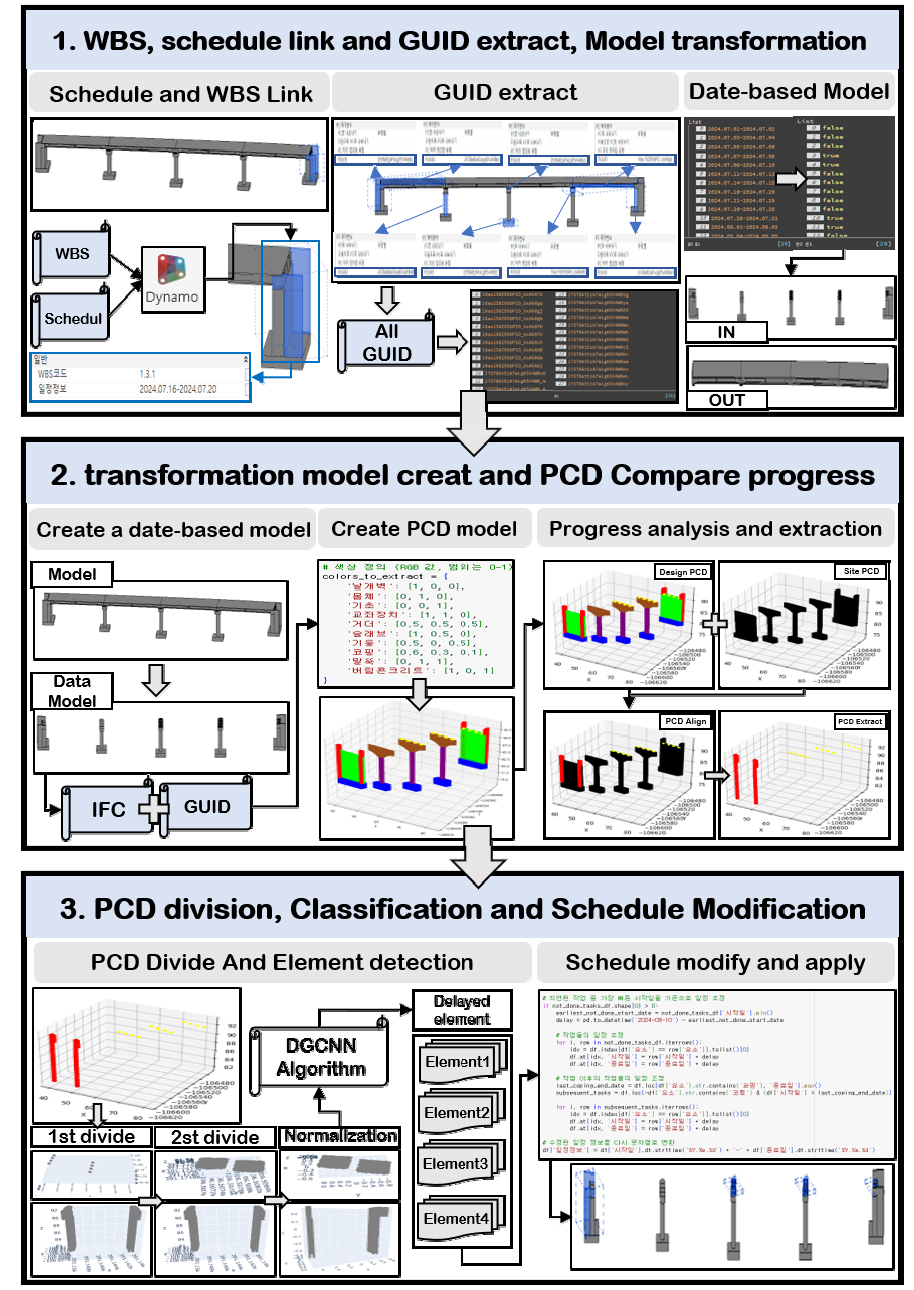
현장의 PCD는 스마트 장비를 사용하여 지연된 상태의 일정에서 시공 중인 교량을 추출하였다고 가정하여 실험을 진행하였다. 설계모델 PCD와 시공 중인 건물 PCD의 진척도를 비교하기 위해 두 PCD에 ICP 알고리즘을 적용해서 두 PCD를 정렬하고 겹치는 부분을 제거하여 진척도의 차이를 추출한다.
마지막으로 추출된 PCD 모델에서 Classification을 사용하여 정확도를 검증하기 위해 코드를 사용하여 추출된 PCD의 분할을 한다. 먼저 색상을 기반으로 1차 분할을 한다. 그러나 1차 분할 과정에서는은 부재가 개별로 분할이 되지 않기 때문에 부재를 개별로 추출할 수 있는 DBSCAN(Density-Based Spatial Clustering of Application with Noise)을 사용하여 Clustering 조건을 추가적으로 부여하고 PCD의 2차 분할을 진행한다. 그 후 DGCNN 알고리즘을 사용하여 분할을 진행한 PCD를 검증 및 분석하고 부재를 파악한다. 파악된 부재를 활용하여 일정을 수정한 후 Dynamo를 통해 설계모델에 수정된 일정을 입력한다.
4.2 설계모델의 일정 및 WBS 입력
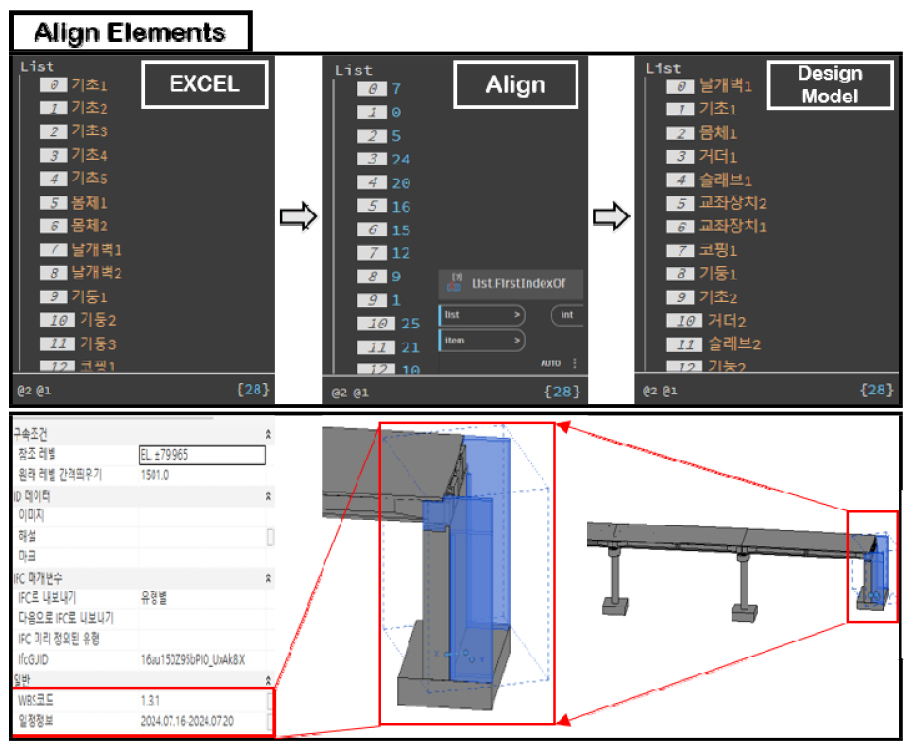
설계모델에서 개별 부재의 일정을 파악하기 위해 부재별 WBS 및 일정정보를 구성하고, Dynamo를 통해 설계모델에 WBS와 일정정보를 입력하는 과정은 Fig. 4와 같다. 첫 번째로 설계모델에 있는 유형을 선택하여 모든 요소를 가져온다. 그리고 일정정보와 WBS가 있는 Excel을 Upload 하고 행과 열을 나눈 후 각 열 데이터를 분리한다. 두 번째로 설계모델에서 요소를 추출하는 순서와 일정에 존재하는 요소의 순서가 서로 다를 수 있다. 따라서 ‘List.FirstIndexOf’ 노드를 사용하여 엑셀의 각 열 데이터와 모델의 모든 요소 데이터를 매칭시킨다. 마지막으로 모델의 요소가 정렬된 순서대로 열 데이터를 나열하면 위 순서에 맞게 WBS와 일정정보를 모델의 특성값으로 입력한다.
4.3 설계모델의 PCD 생성
4.3.1 GUID 추출 및 설계모델의 PCD 생성
설계모델을 PCD로 변환하기 위해 설계모델의 정보를 추출해야 한다. 따라서 IFC 기반의 설계모델에서 각 요소의 GUID를 추출하기 위한 과정은 Fig. 5와 같다. Dynamo에서 설계모델의 모든 요소의 유형을 선택 후 모든 요소의 ID를 호출한다. 다음으로 GetParameterValueByName 노드를 사용하여 모든 요소의 GUID를 추출하고 Excel에 자동으로 저장한다.
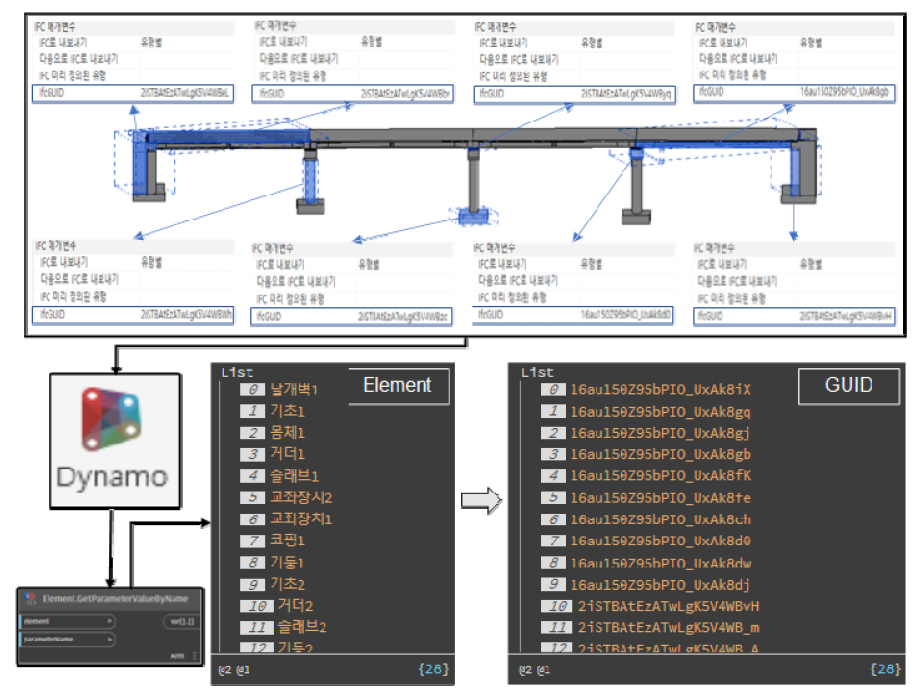
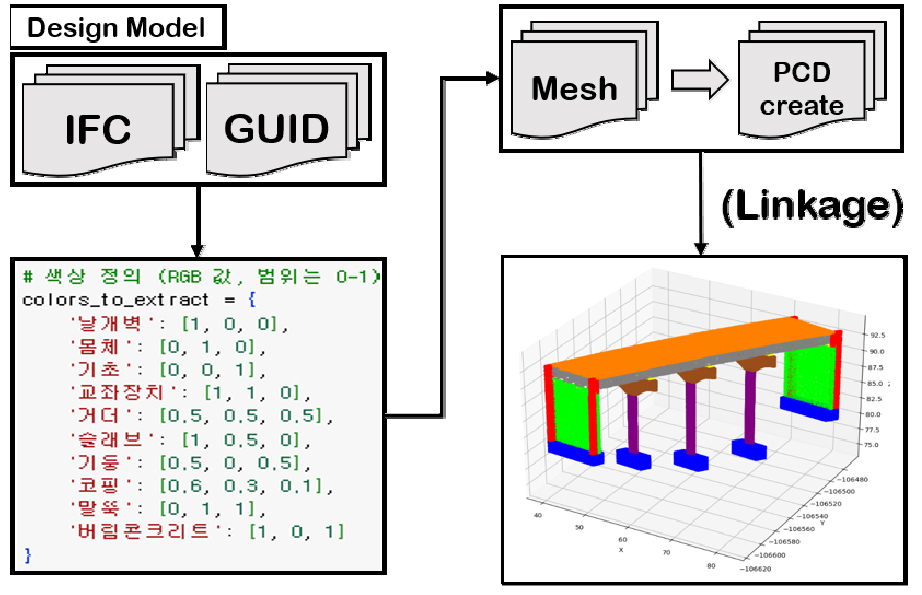
기존의 스마트 장비에서 추출한 PCD는 정보가 없는 단순한 Point이므로, 부재의 정보가 존재하는 PCD를 생성하기 위해 IFC 기반의 설계모델에서 추출된 GUID 정보를 기반으로 설계모델을 PCD의 형태로 생성하는 과정은 Fig. 6과 같다. 추출한 GUID와 IFC 데이터를 Upload 하고 Google Colab의 환경에서 코드를 제작하여 Excel에 존재하는 GUID와 IFC 형식의 파일이 서로 매칭되도록 한다. 그리고 매칭된 정보를 통해 설계모델에 존재하는 부재를 특정한 후 특정화된 객체에서 Mesh화작업을 통해 형태를 파악하고 부재의 특징점을 파악하여 부재를 PCD로 생성한다. 이때 각 PCD는 15000개의 Point로 이루어졌고 특징점 이외의 Point는 형태에 맞게 무작위로 설정하였으며, PCD가 생성될 때 요소를 구분할 수 있도록 요소마다 색을 부여하는 설정을 추가하여 각 요소에 해당하는 색이 담긴 PCD를 생성한다. 따라서 기존의 스마트 장비를 통해 부재에 대한 정보가 없고 형상의 정보만 보여주는 PCD가 아닌 각 Point에 위치정보가 존재하며, 각 부재를 구분할 수 있는 PCD가 생성된다. 마지막으로 IFC와 GUID를 통해 생성된 PCD를 지정된 공간에 모두 호출하고 해당하는 위치에서 PCD가 생성되도록 각 부재가 가지고 있는 위치정보를 사용하여 설정한다. 따라서 각 PCD는 위치정보에 맞게 자동으로 결합이 되며, 설계모델의 PCD를 생성한다.
4.3.2 모니터링 시점 설계모델 PCD 생성
건설 모니터링이 이루어지는 시점에서 현장과 설계모델 간의 진척도를 비교하기 위해 해당 시점에 맞게 설계모델의 PCD가 생성되어야 한다. 모니터링 진행 시점의 설계모델을 추출한 과정은 Fig. 7과 같다. 일정 정보가 연동된 설계모델에 Dynamo를 사용하여 설계모델의 모든 요소를 불러오고 각 요소에 입력된 일정 정보를 불러온다. 다음으로 지정한 기간까지 설계된 일정 정보를 Excel에서 추출한 후 Dynamo에 Upload 한다. 그리고 지정한 기간의 일정과 설계모델에 입력된 일정을 매칭시켜서 설계모델의 어떤 요소가 해당이 되는지 확인한 후 노드를 통해 해당이 된 요소만 남도록 필터링 작업을 사용한다. 이때 지정한 기간에 해당이 되는 요소는 IN으로 분류하여 정보를 표현하고 해당이 되지 않는 요소는 OUT 분류하여 정보를 표현한다. 따라서 OUT 분류된 정보를 제외하고 IN으로 분류된 정보를 사용하여 설계모델을 일정에 맞게 재구성한다.
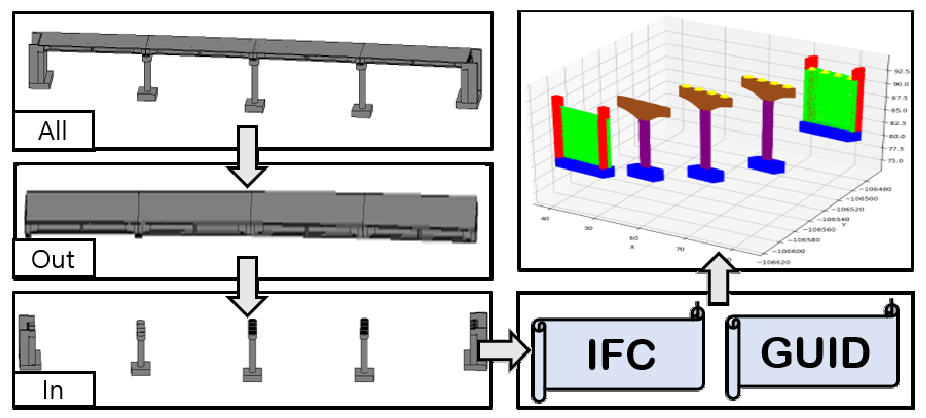
마지막으로 4.3.1에서 제작한 노드를 사용하여 남은 모델의 모든 요소에서 GUID를 추출하고 제작한 PCD 추출 코드를 활용하여 IFC 형태의 셜계모델에서 추출된 GUID를 기반으로 개별 부재 PCD를 파악 후 생성하고 각 PCD를 하나의 공간에 호출하여 PCD가 가지고 있는 위치정보를 기반으로 설계모델의 PCD를 생성한다.
4.4 설계모델과 현장의 진척도 비교
4.4.1 두 PCD 정렬 및 차이점 추출
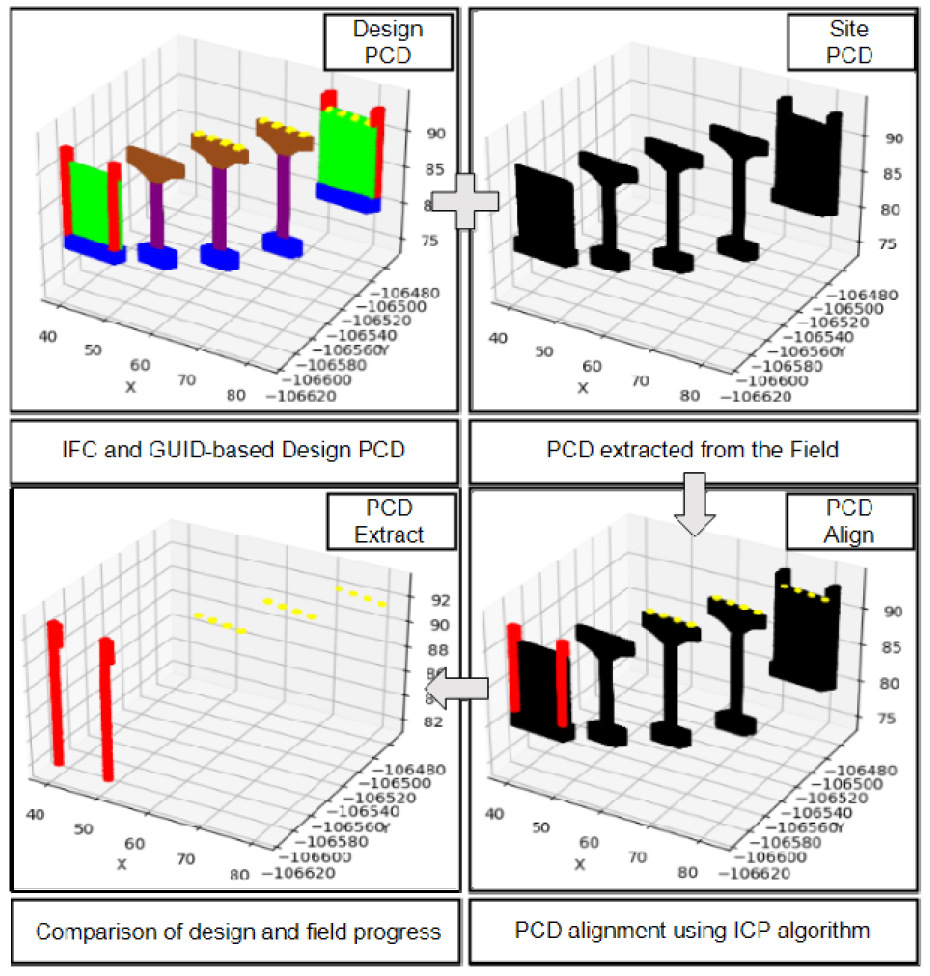
모니터링 시점에서의 설계 PCD와 현장 취득 PCD의 정렬 및 차이점 추출을 통해 진척도 비교를 수행한다. 이때 현장의 PCD는 스마트 장비를 사용하여 지연된 상태의 일정에서 시공 중인 교량을 추출하였다고 가정하여 실험을 진행하였다. 두 PCD를 정확하게 정렬 및 비교하기 위해 ICP 알고리즘을 사용한다. ICP 알고리즘은 초기 정렬 상태에 따라 데이터가 누적되어 정렬 결과에 영향을 미칠 수 있으므로 현장의 PCD 범위를 설계모델의 범위에 맞게 형태의 변형이 없도록 배율을 조정한 후 ICP 알고리즘을 적용한다. 범위가 같아진 두 PCD는 최대한 일치하도록 변환 행렬을 반복적으로 사용하여 각 Point의 가장 가까운 Point를 찾고 최적의 회전 및 이동을 계산하며, 두 PCD를 정렬한다.
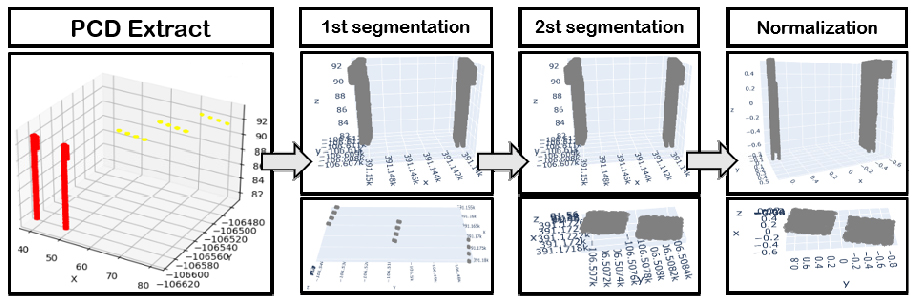
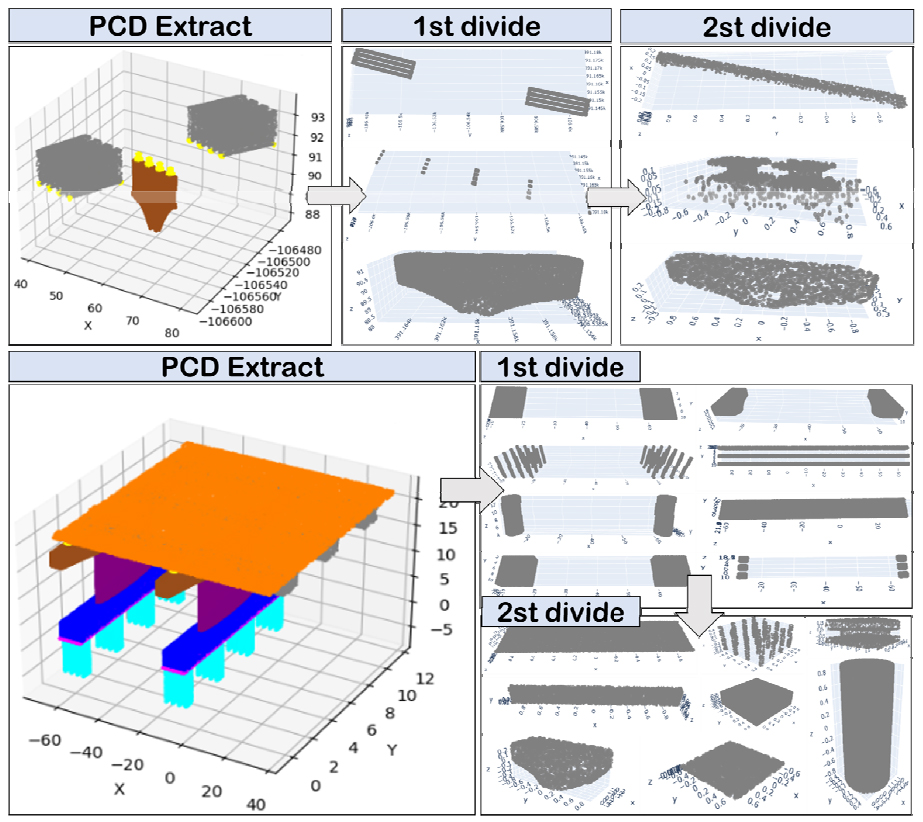
설계모델을 기반으로 생성된 PCD는 무작위로 Point를 배치하여 생성하였으므로, 정렬 후 겹치는 부분을 제거하는 과정에서 겹치는 부분의 Point는 완전히 삭제되지 않는다. 따라서 겹치는 부분의 Point를 완전히 제거하기 위해 각 점의 반경에 있는 모든 점을 파악할 수 있도록 다차원 공간에서의 점 데이터 탐색을 효율적으로 수행할 수 있는 KDtree를 사용하여 반경을 탐색한다. 이때 Point를 제거하는 과정에서 각 부재에 있는 Point가 범위로 인해 서로 영향을 주어 부재의 형태 분석에서 문제가 생기지 않도록 고려하며, 설계모델의 Point 반경을 설정하고 KDtree를 통해 탐색으로 겹치는 부분의 PCD를 제거한다. 마지막으로 제거 후 남은 PCD는 Fig. 8의 ‘PCD Extract’와 같이 추출된다.
4.4.2 추출된 PCD 분할 및 정규화
두 PCD의 비교를 통해 추출된 부분은 하나의 PCD 값으로 출력되기 때문에 정확한 부재 요소를 파악하고, 일정을 수정하기 위해서 PCD의 분할 및 검증이 필요하다. 따라서 PCD의 분할을 진행하는 과정은 Fig. 9과 같다. 첫 번째로 색상을 기반으로 PCD를 1차 분할을 하기 위해 특정 색을 가지고 있는 PCD를 파악하는 필터를 설정하고 PCD를 추출한다. 그러나 1차 분할은 일정에 적용하는 단위로 분할이 진행되지 않는다. 그리하여 두 번째로 각 색상의 PCD를 일정에 맞게 개별로 추출하기 위해 Clustering 조건을 통해 가깝게 연결되어 있는 Point를 파악한 후 PCD를 분할 할 수 있도록 DBSCAN 알고리즘을 사용한다. 이러한 DBSCAN 알고리즘을 통해 정확한 형태의 PCD를 얻기 위해 클러스터가 형성되기 위한 최소의 Point 수를 50개로 설정하여 부재를 표현하고 부재의 특성상 붙어있는 슬래브, 거더의 경우 설계모델에서 PCD를 생성할 때 설정한 개수를 넘지 않도록 설정한다. 이후 같은 클러스터에 속하는 두 점의 최대거리를 설정하고 Point의 군집화를 진행하여 색상으로 구분된 PCD의 2차 분할을 진행한다. 마지막으로 분할 검증 및 예측을 위해 DGCNN 알고리즘에 PCD를 데이터로 적용할 수 있도록 분할된 PCD의 Point 수를 알고리즘의 조건에 맞게 2048개로 설정하여 모든 PCD의 정규화를 진행한다.
4.5 DGCNN 알고리즘 적용 및 부재 분석
4.5.1 알고리즘 학습데이터 생성
DGCNN 알고리즘의 학습데이터에서 Class는 몸체, 교좌장치, 기둥, 코핑, 기초, 거더, 버림콘크리트, 말뚝, 슬래브, 날개벽으로 총 10개의 Class를 사용한다. 몸체 350개, 교좌장치 300개, 기둥 260개, 코핑 300개, 기초 330개, 거더 300개, 버림콘크리트 300개, 말뚝 270개, 슬래브 310개, 날개벽 330개로 각 Class의 데이터 개수는 260~350개로 설정하여 총 3050개의 부재를 사용한다. 그리고 각 부재는 Point의 개수를 2048개로 설정하여 PCD로 생성한 후 데이터 증강기법 중 회전, 이동, 반사를 사용하여 데이터를 증강한 후 PCD의 정규화를 진행하고 각 Class를 균등하게 분배하여 Test, Train의 데이터 세트를 생성한다. 이때 데이터의 Data는 float32, Label은 int64으로 설정한다.
4.5.2 모델 구축과 부재 분석
DGCNN 모델은 학습의 효율과 메모리의 균형을 맞추기 위해 데이터 세트에서 설정한 2048개의 Point 중에서 1024개의 Point를 Sampling 후 사용하고 이웃 점의 개수는 20으로 설정하여 데이터를 파악한다. 그리고 DGCNN 모델의 학습을 위해서 Epoch는 100, Batch_size는 16으로 설정하여 부재를 학습한다. 또한 정확도가 지속해서 떨어지거나 정확도가 50%의 이하일 때 학습이 멈추도록 설정한다. 이후 제작된 데이터 세트를 호출하여 설정한 조건을 통해 Loss 계산 및 학습을 통한 정확도 계산을 진행하고 학습된 모델을 저장한다.
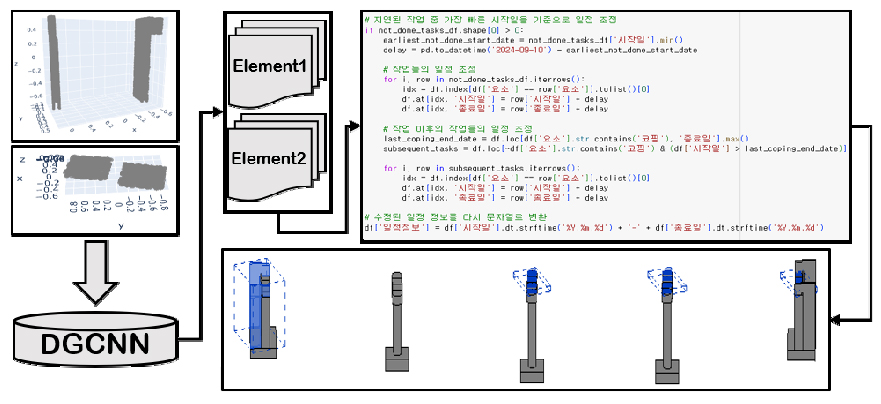
마지막으로 PCD의 부재 파악을 위해 이전 단계에서 추출한 PCD와 저장된 학습 모델을 호출하고 추출한 PCD 파일을 파악하며 학습에 사용된 포인트의 개수와 동일하게 샘플링을 진행한다. 이후 모델에 맞는 배치크기, Point 개수, 채널 수의 구성 순서를 맞추기 위해 NumPy 배열을 PyTorch 텐서로 변환하고 데이터의 전처리를 수행한 다음 DGCNN 모델을 사용하여 Class의 예측을 수행 및 저장한다.
4.6 부재 분석 결과물의 일정 활용
여러 건설 프로젝트에서 일정의 지연으로 비용이 추가로 발생하기 때문에 정확한 정보가 필요하므로 정확도가 개선된 부재의 결과를 활용하여 Google Colab에서 일정을 자동으로 수정하고자 한다. 이러한 일정의 수정 과정은 Fig. 10와 같다. 차이점으로 추출된 PCD를 분할하고 DGCNN 알고리즘으로 분석해서 나온 결과와 계획된 공사 일정을 호출하고 공사가 되지 않은 요소를 파악하여 일정에서 지연된 부분을 찾는다. 그리고 지연된 일정에서 가장 빠른 시작일을 찾고 각 작업의 소요 되는 시간을 유지하며 일정을 수정한다. 마지막으로 코드를 통해 수정된 일정은 Dynamo를 사용하여 설계모델의 기존 일정을 자동으로 수정한다.
5. 사례 적용 결과
5.1 DGCNN 알고리즘 학습 검증 결과
본 연구에서 DGCNN 알고리즘의 성능 검증은 다중 Class를 사용하였기 때문에 혼동행렬과 Loss 값을 표현한 그래프를 사용하였다. 또한 ROC(Receiver Operating Characteristic) 곡선의 분석과 정밀도와 재현율을 통한 Precision-Recall 곡선을 표현하였으며, Precision-Recall 곡선을 계산하여 mAP 값을 추출하였다. 학습 결과는 Table 1과 같다. 대부분 Class의 정확도가 1.00이 나왔으며, 기초, 버림콘크리트, 슬래브의 경우 0.90 이상 인식되었다. 또한 정밀도는 0.9829이고, 재현율은 0.9830이며 F1 Score는 0.9829가 측정되었다.
Table 1.
Classification accuracy value
| Class | 결과값 |
| Body | 1.00 |
| Bridgebearing | 1.00 |
| Column | 1.00 |
| Coping | 1.00 |
| Foundation | 0.99 |
| Girder | 1.00 |
| Leanconcrete | 0.90 |
| Pile | 1.00 |
| Slab | 0.94 |
| Wingwall | 1.00 |
| Precision | 0.9829 |
| Recall | 0.9830 |
| F1 Score | 0.9829 |
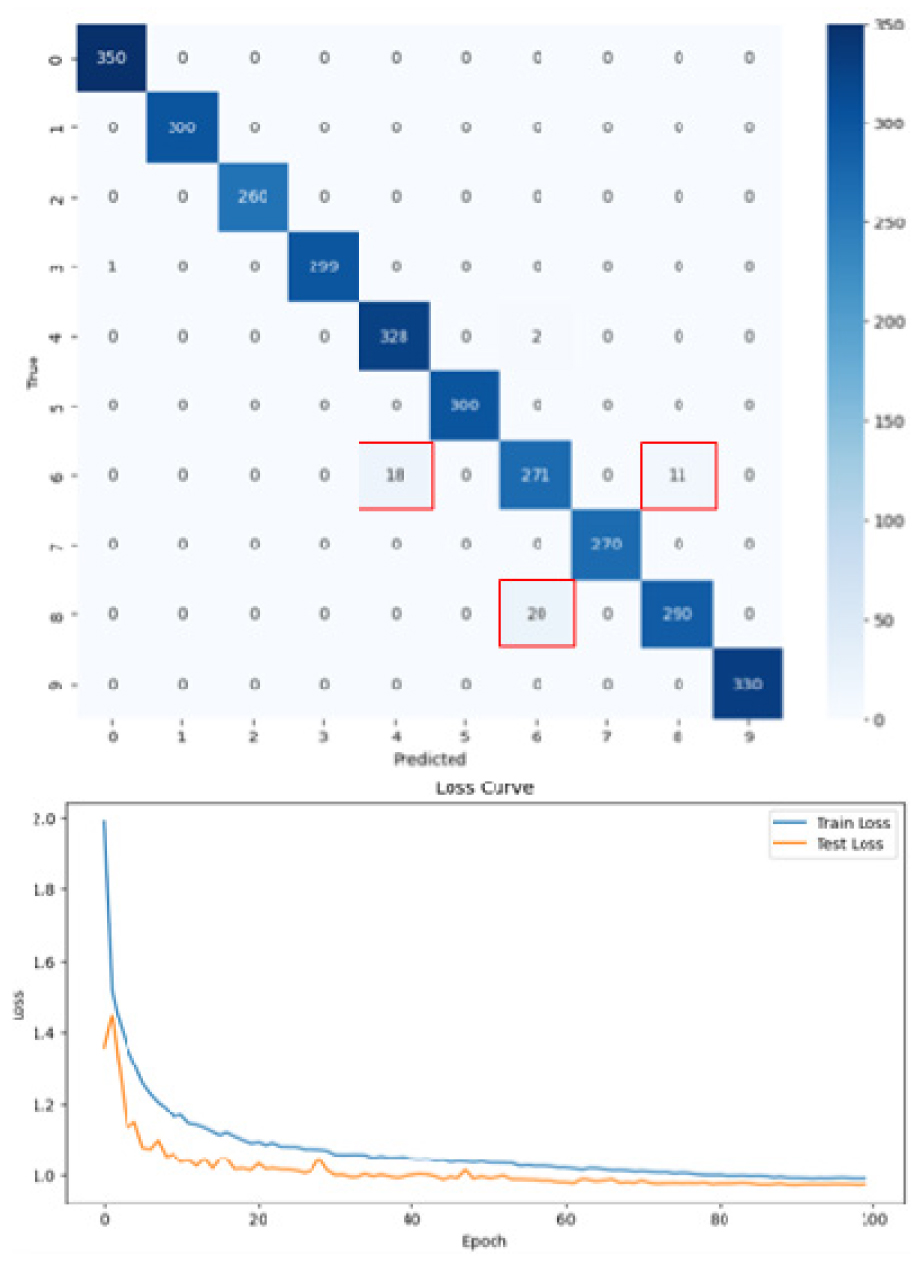
혼동행렬과 Loss 그래프의 결과는 Fig. 11과 같다. 혼동행렬의 결과는 대부분의 Class에서 정확한 예측결과를 보였으나, 일부 버림콘크리트 class가 기초와 슬래브로 잘못 예측되었다. 또한 슬래브 class를 버림콘크리트로 예측하였다. 따라서 형태가 비슷한 Class 사이에 상호 혼동이 조금 발생하는 것이 보인다. Loss 그래프의 X축은 학습 횟수, Y축은 Loss 값으로 구성되어 있다. 그래프의 모습이 우하향 모습으로 최적화된 곡선을 보여주고 있으므로 학습이 잘 진행된 것을 볼 수 있다.
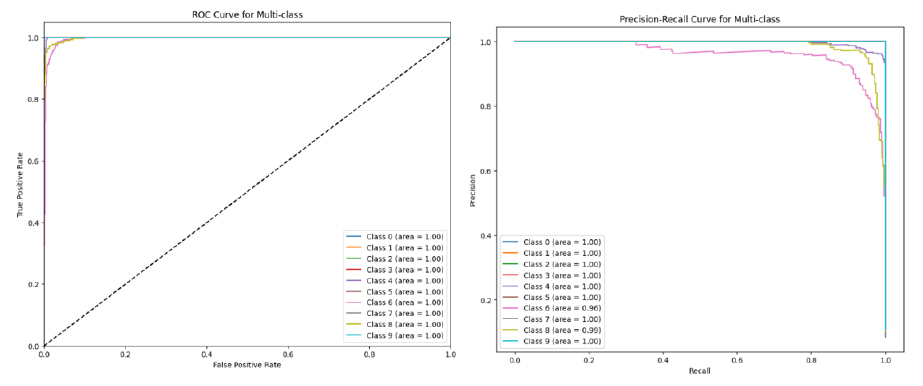
ROC 곡선과 Precision-Recall 곡선의 결과는 Fig. 12와 같다. ROC 곡선은 모든 Class에 대한 ROC 곡선의 AUC 값이 1.00이고 그래프에서 FPR이 0에 가깝고 TPR이 1에 가까운 위치에서 ROC 곡선이 시작되는 것은 학습된 모델이 매우 높은 성능을 보이고 있음을 의미한다. 또한 재현율과 정밀도 간의 관계를 나타낸 Precision-Recall 곡선은 버림콘크리트와 슬래브에서 다른 Class에 비해 조금 낮아진 것을 볼 수 있지만, 각 Class의 값이 대부분 1이 나오면서 모델의 성능이 우수하게 나온 것을 볼 수 있다. 그리고 기초, 버림콘크리트, 슬래브를 제외한 모든 Class의 AP값이 1.00으로 나오며 mAP 값은 0.9946으로 측정되었다.
5.2 일정 및 WBS 입력
설계모델에서 개별 부재의 일정을 파악하기 위해 Dynamo를 통해 모델에 WBS와 일정 정보를 입력한 결과는 Fig. 13과 같다. 본 연구는 두 가지의 설계모델을 사용하여 검증을 수행한다. 첫 번째 모델은 8개의 Class를 사용한 모델이고 두 번째의 모델은 기존 8개의 Class에 말뚝과 버림콘크리트를 추가한 모델이다. (이런 부분은 검증 장의 처음 부분에 언급해야함. 글 중간에 언급하는 정보가 아님) 정보가 없는 각 부재에 WBS를 Class에 맞게 입력했고 일정도 계획에 맞게 입력이 잘 되어 있는 것을 볼 수 있다.
5.3 공사 시점 설계모델 제작
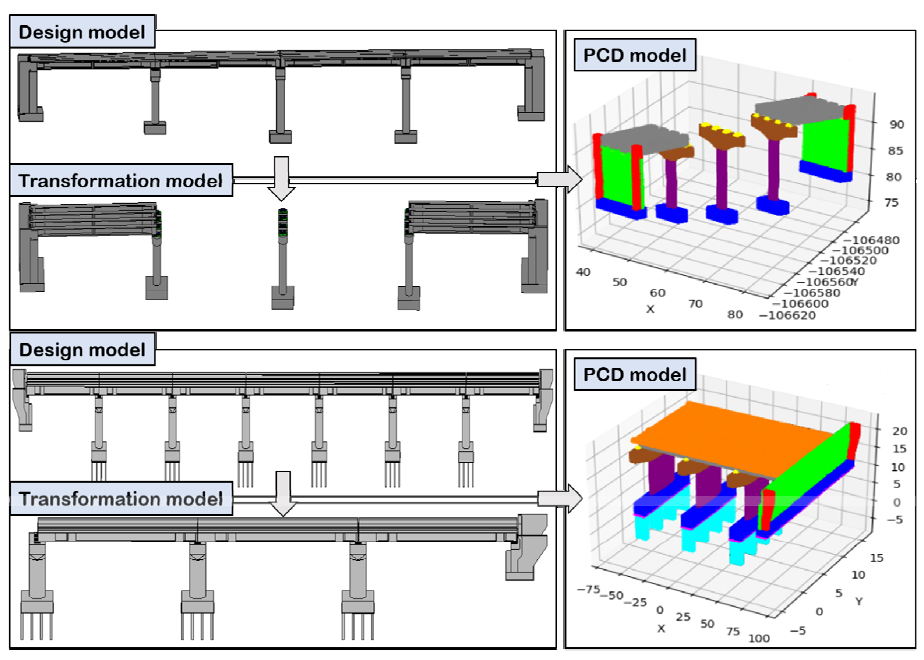
시공 중인 현장과 계획된 설계 일정의 진척도를 비교하기 위해 기준이 되는 일정에 맞춰서 설계모델을 변경한 결과는 Fig. 14와 같다. 일정에 해당이 되지 않는 부재는 삭제하여 모델을 자동으로 재구성하였다. 그리고 변형된 모델에서 IFC 형식의 부재와 추출한 GUID를 사용하여 개별 PCD를 생성할 때 각 PCD의 Point 개수는 15,000개로 설정하였고 부재의 형태를 유지하며 Point의 간격과 배치는 무작위로 설정되어 개별 PCD를 생성하였다. 이때 생성된 부재는 각 요소가 구별되기 쉽도록 색을 부여하였다. 마지막으로 IFC에서 얻은 위치정보를 사용하여 공사 시점에 맞게 설계모델 PCD를 제작하였다.
5.4 두 PCD의 진척도 분석 및 비교
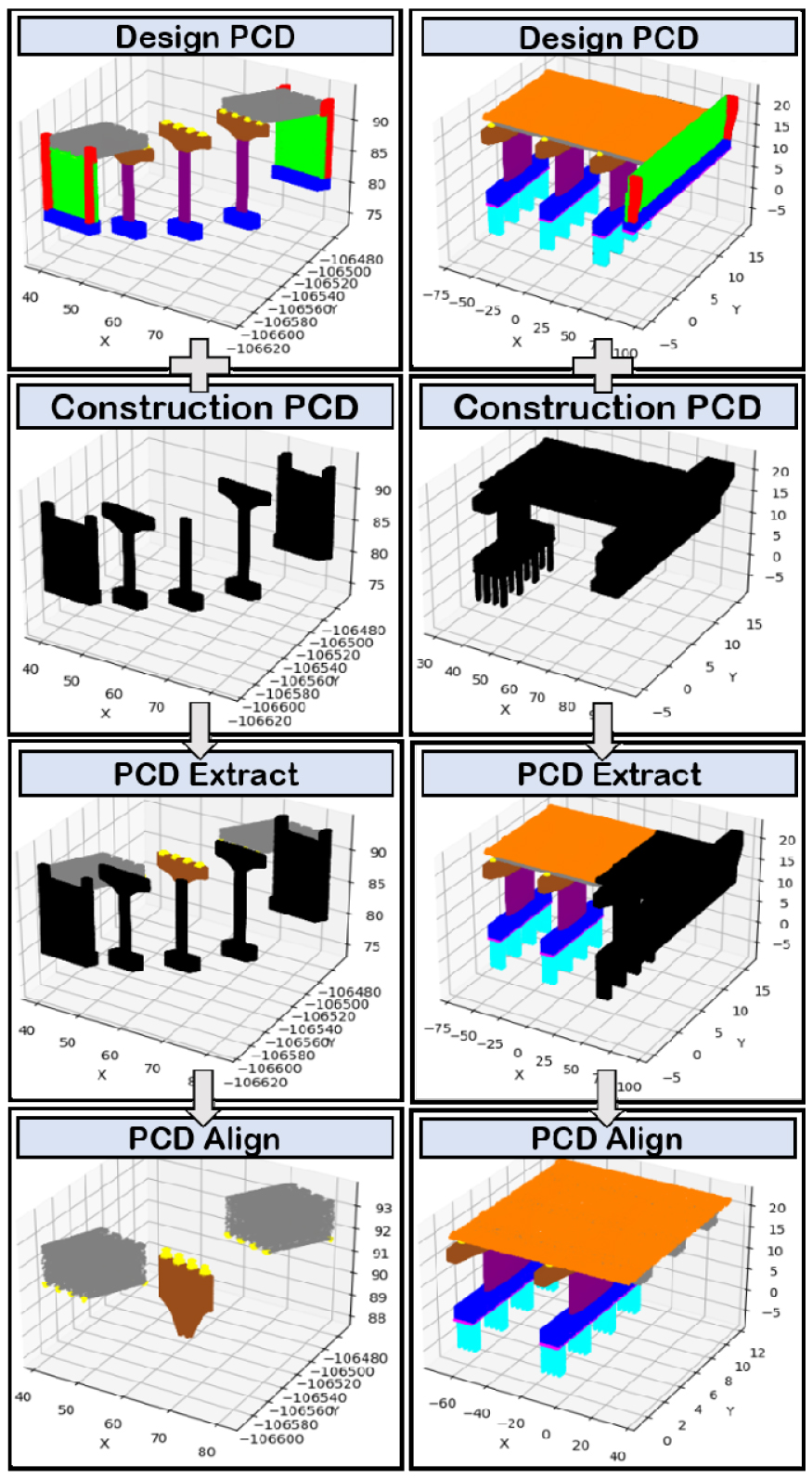
설계모델 PCD와 현장 건물 PCD의 진척도를 비교한 결과는 Fig. 15와 같다. 첫 번째 실험은 교량을 건설할 때 왼쪽에서 오른쪽으로 순차적인 공사가 진행되는 사례이다. 두 번째 실험은 양쪽에서 동시에 공사가 진행되는 사례이다. 두 개의 사례를 각각 설계 PCD와 현장 PCD를 정렬하고, 진척도를 비교했을 때 차이가 발생한 부분을 명확하게 볼 수 있다. 그리고 겹치지 않는 부분을 지연된 부분으로 인지하고 추출하였다.
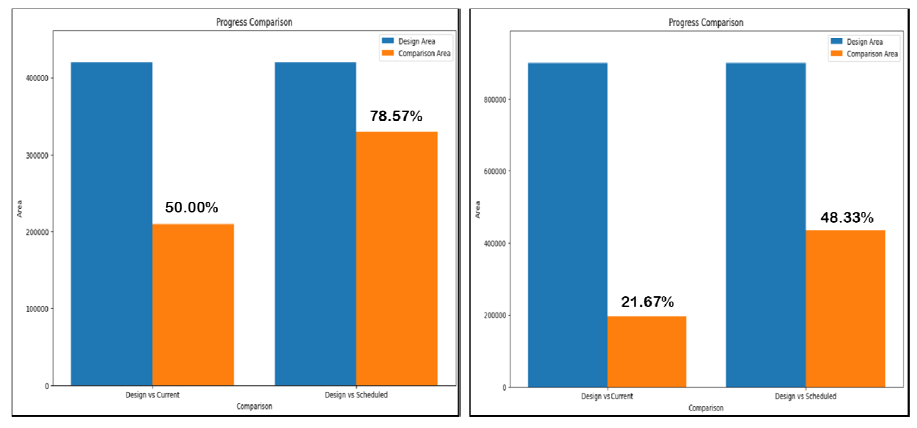
설계 PCD와 현장 PCD의 진척도 차이를 수치적 차이로 확인하기 위해 완성된 교량을 기준으로 체적을 사용하여 비교한 결과는 Fig. 16과 같다. 첫 번째 교량의 경우 실험 PCD는 78.57%, 현장 PCD는 50.00%로 28.57%의 차이가 발생하였다. 두 번째 교량의 경우 실험 PCD는 48.33%, 현장 PCD는 21.67%로 26.66%의 차이가 발생하였다.
5.5 추출된 PCD 분할 및 정규화
두 PCD를 비교하고 추출된 부분의 PCD는 하나의 PCD로 출력되기 때문에 개별로 분할하고 추출된 PCD의 분할을 진행한 결과는 Fig. 17과 같다.
두 사례에서 추출된 PCD에 색깔을 기준으로 1차 분할을 하여서 부재를 파악하였다. 그리고 DBSCAN 클러스터를 사용하여 2차 분할을 진행하였다. 따라서 1차 분할에서 첫 번째의 교량은 거더, 교좌장치, 코핑이 추출되었고 두 번째의 교량은 1차 분할을 통해 버림콘크리트, 말뚝, 기둥, 기초, 교좌장치, 코핑, 거더, 슬래브 추출하였다. 그리고 2차 분할을 통해 첫 번째와 두 번째의 교량에서 모든 부재가 분할되어 추출된 것을 볼 수 있다.
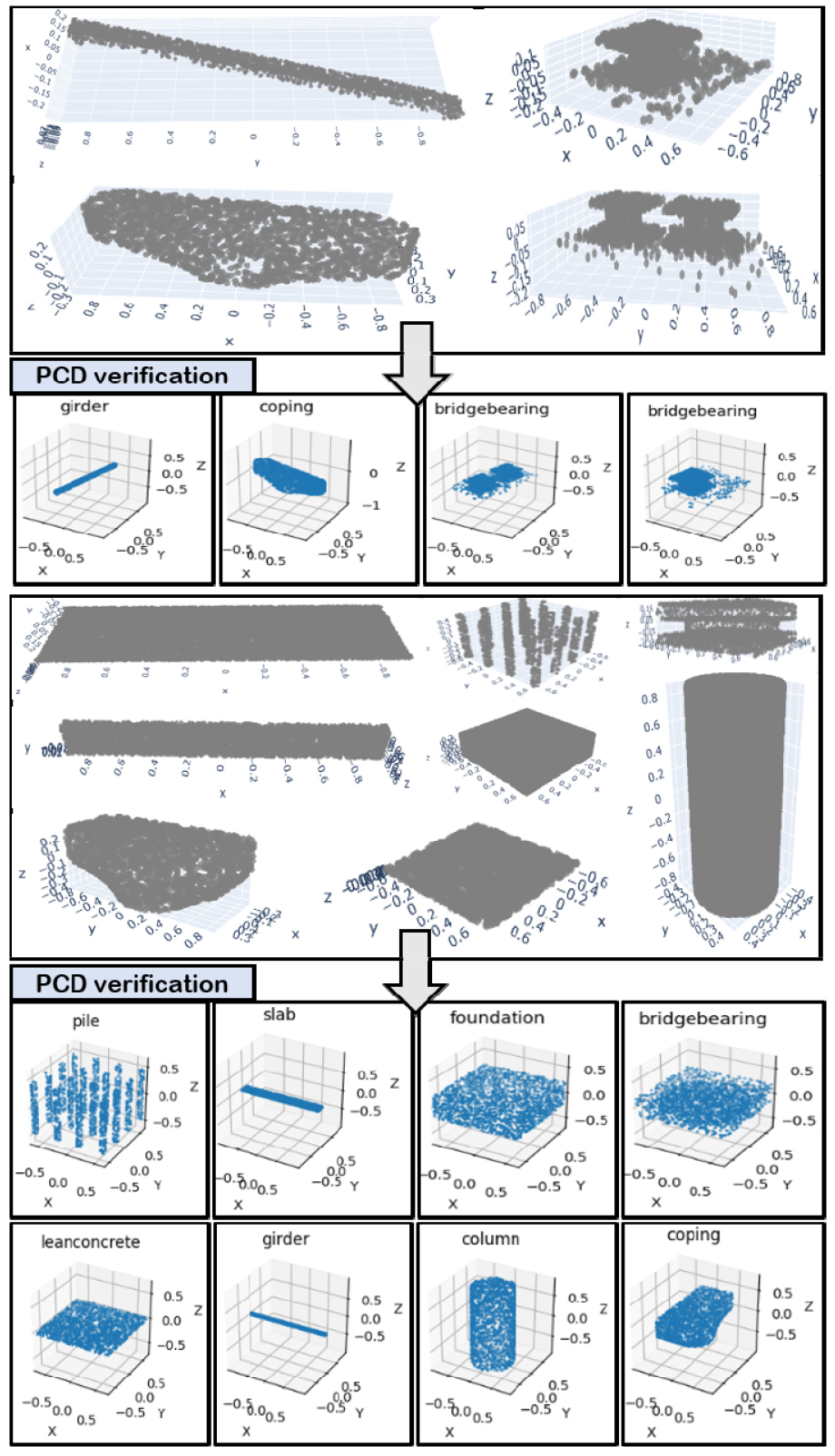
마지막으로 추출된 각 사례의 분할된 PCD를 DGCNN 알고리즘에 적용하기 위해 Point의 수를 2048개로 설정한 후 정규화를 진행하여 PCD의 범위를 재구성하였다.
5.6 DGCNN을 사용한 PCD 부재 분석
DGCNN 알고리즘을 적용하여 지연된 부재를 파악한 결과는 Fig. 18과 같다. DGCNN 알고리즘을 적용했을 때 첫 번째의 교량에서 추출된 거더, 코핑, 교좌장치는 모두 결과가 알맞게 나온 것을 볼 수 있다. 그리고 두 번째의 교량에서 추출된 버림콘크리트, 말뚝, 기둥, 기초, 교좌장치, 코핑, 거더, 슬래브도 모두 결과가 알맞게 나온 것을 볼 수 있다.
5.7 부재 분석 결과 기반 일정 변경
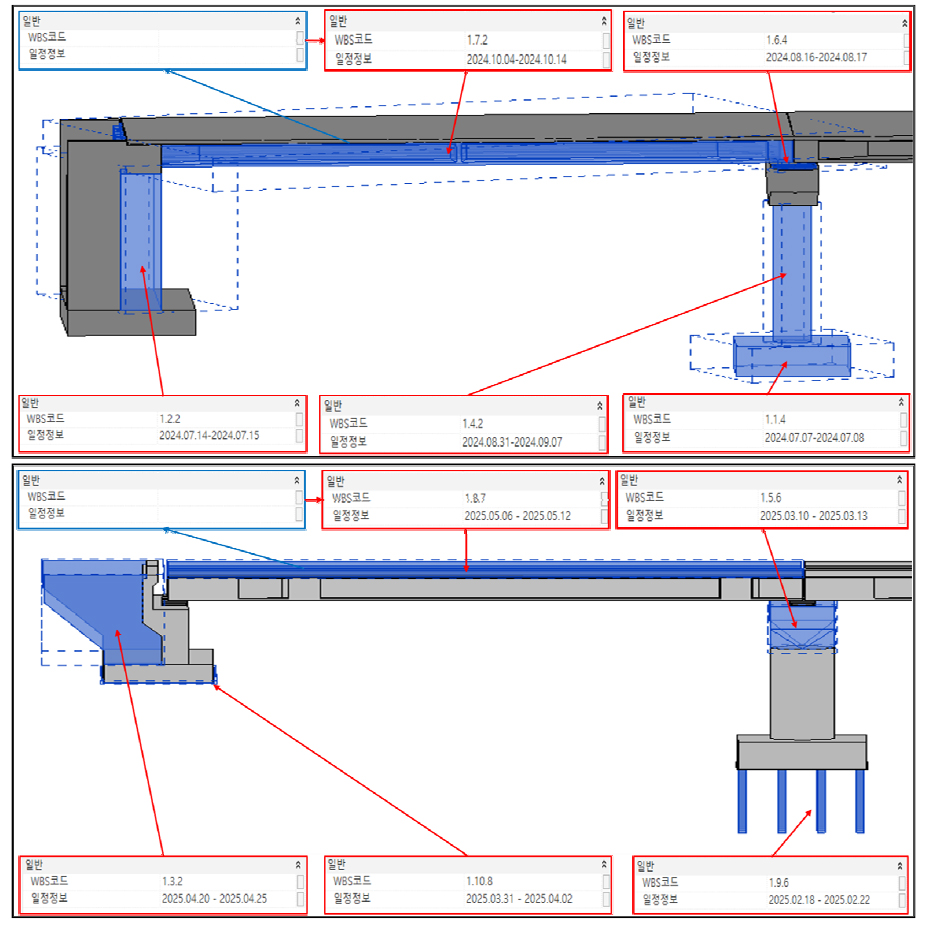
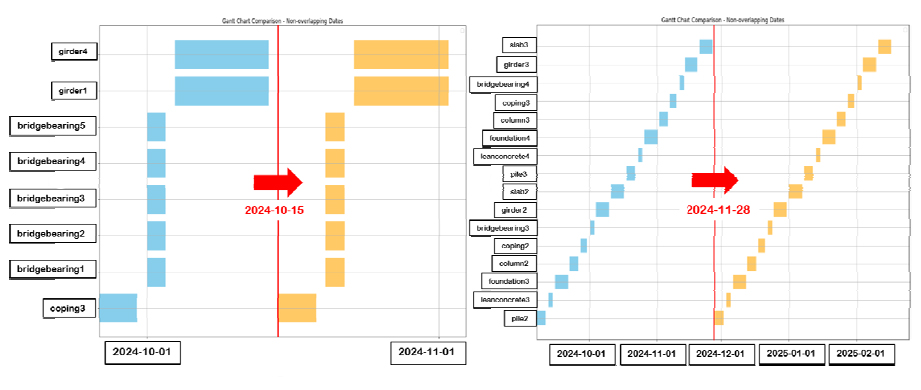
DGCNN 알고리즘을 통해 확인한 지연 요소를 기반으로 일정을 자동으로 수정한다. 수정된 일정의 결과는 Fig. 19와 같다. 첫 번째 실험은 기존의 계획된 일정을 기반으로 검사를 진행했을 때 10월 14일을 기준으로 총 8개의 일정이 완료되지 않았기 때문에 기존의 파란색 일정을 10월 15일부터 일정이 다시 시작되도록 수정하여 수정된 일정은 노란색으로 표기한다. 그리고 두 번째 실험은 기존의 계획된 일정을 기반으로 검사를 진행했을 때 11월 27일을 기준으로 총 16개의 일정이 완료되지 않았기 때문에 기존의 파란색 일정을 11월 28일부터 일정이 다시 시작되도록 수정하여 수정된 일정은 노란색으로 표기한다.
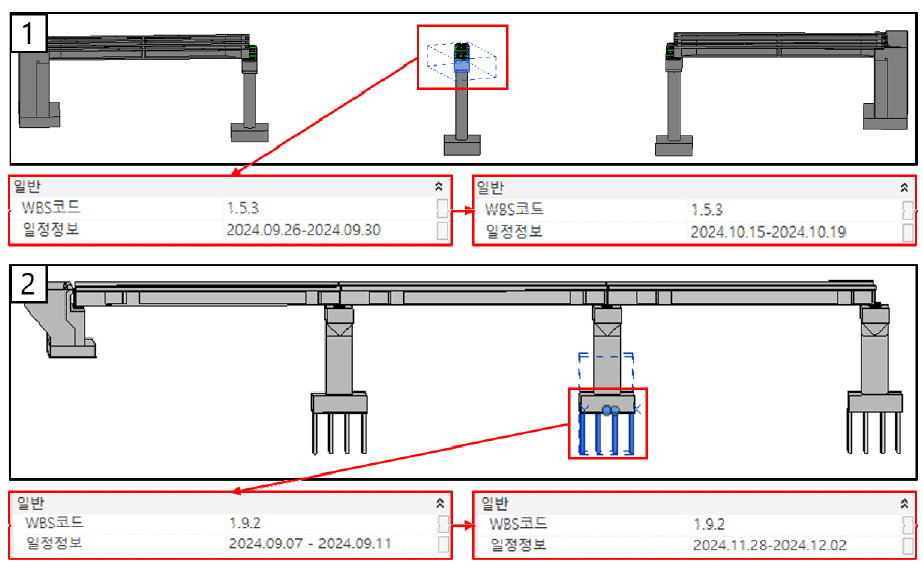
첫 번째와 두 번째 사례의 수정된 일정 적용의 결과는 Fig. 20과 같다. 수정된 일정이 자동으로 모델에 입력되었다.
6. 결론
본 연구에서는 취득된 현장 건물의 PCD와 공사 시점의 설계모델 PCD를 통합하고 시각화하며 일정에 따른 정확한 차이점을 측정했다. 그리고 차이가 발생한 PCD의 분할을 진행하여 DGCNN 알고리즘 모델로 정확도를 검증하였다. 마지막으로 검증된 정보를 기반으로 수정된 일정을 모델에 반영하는 연구를 진행하였다.
DGCNN 알고리즘 모델의 인식률은 10개의 Class에서 대부분 Class의 정확도가 1.00이 나왔고 기초, 버림콘크리트, 슬래브의 경우 0.90 이상 측정되며 학습이 잘되었다. 따라서 기존 연구는 Segmentation으로 부재를 인식하여 교각의 경우 57.4%, 상부 구조의 경우 88.9%, 베어링의 경우 42.7%, 교대의 경우 74.2%의 정확도가 측정되었고 본 연구와 비교했을 때 모든 요소의 정확도가 높게 개선되었으며 특히 작은 크기의 교좌장치는 본 연구를 통해 42%에서 100%로 개선되었다. 그리고 학습된 DGCNN을 사용하여 설계모델의 PCD와 현장 건물의 PCD를 정렬하여 비교한 두 PCD에서 지연된 요소를 확인한 결과는 오류가 없었다.
본 연구를 활용한다면 BIM 모델을 활용하는 건설 프로젝트 모니터링에서 BIM 모델의 IFC와 GUID를 기반으로 모델의 위치정보를 포함하고 속성정보를 추가하여 제작한 PCD와 현장에서 취득한 PCD를 통합할 때 BIM 모델의 정보를 활용할 수 있는 장점이 있다. 그리고 기존의 작업은 BIM 모델과 PCD를 정렬하기 위해 서로 다른 형식의 두 데이터를 정렬해야 하는 복잡한 과정을 거쳤지만, 기존 연구와 다르게 형식이 같은 데이터를 사용함으로써 설계모델의 PCD를 생성할 때 위치정보를 간단한 방법으로 얻을 수 있었으며, 간단한 정렬 과정을 통해 적은 시간만 소요하여 두 데이터를 정렬할 수 있다. 따라서 설계모델의 PCD를 기반으로 복잡하다는 한계점을 개선할 수 있으며 간단한 과정으로 인해 소량의 시간을 사용하여 두 PCD를 기반으로 진척도의 비교할 수 있다. 더불어 현장에서 취득한 전체 PCD에서 구성하고 있는 각 요소의 PCD를 classification으로 나누어서 인식하지 않고 전체 PCD에서 요소를 Segmentation으로 판단할 때 잘못된 인식으로 인한 정확도의 문제를 개선하며 정확한 정보를 얻을 수 있다. 이러한 높은 정확도의 결과는 공사 지연이 자주 발생하는 건설 프로젝트에서 정확한 정보를 활용하여 지연에 대한 문제를 정확하게 파악하여 비용의 불필요한 증가를 감소시킬 수 있다.
본 연구는 전체 건설 모니터링에서 IFC 모델을 사용함으로써 설계와 시공의 정보 단절을 해결할 수 있었으며, 이해관계자들에게 정보를 효과적으로 전달하고 관리할 수 있다. 또한 앞으로 스마트 장비의 활용이 늘어나면서 PCD 생성 및 활용이 높아지는 연구에 적용될 수 있는 기여도를 지니고 있다.
연구의 한계점으로는 DGCNN 알고리즘 모델에서 학습을 진행하였을 때 기초, 버림콘크리트, 슬래브의 경우 0.99, 0.90, 0.94라는 높은 값이 나왔지만, 혼동행렬의 검증 결과에서 형태가 비슷할 경우 Class의 인식이 혼동되는 경우가 존재했다. 따라서 형태가 비슷한 경우 결과의 오류가 있을 수 있으므로 추가적인 연구가 필요하다. 또한 본 연구는 10개의 Class를 적용하여 실험을 진행하였기 때문에 10개 이상의 요소를 가진 교량에 적용할 수 없어서 요소를 더 다양하게 학습하고 실험하는 연구가 필요하다.
