

1. 서 론
1.1 연구의 배경 및 목적
1.2 연구의 범위 및 방법
2. 문헌 고찰
2.1 이산사건시뮬레이션(DES)
2.2 덤프트럭 작업 모니터링
3. GPS 센싱 기반의 실시간 토공 공정 시뮬레이션 및 최적화 기술
3.1 GPS 수집 스마트폰 어플리케이션 개발
3.2 트럭 위치 시각화 기술
3.3 Geo-fence 기반 트럭 사이클타임 추출 및 DES 기반 생산성 추정 기술
4. 사례 연구 및 결과
4.1 현장 3D 지형 모델 구현 및 트럭 위치 시각화
4.2 GPS 데이터 기반 트럭의 사이클타임 예측 및 DES 기반 생산성 예측
5. 결론
1. 서 론
1.1 연구의 배경 및 목적
1.1.1 건설 업계의 낮은 디지털화 수준
건설업은 지난 수십 년 간 생산성이 정체되고 있는 산업으로 지적되어왔다. 맥킨지에 따르면 1995년부터 2014년까지, 20년간 건설 산업 생산성 증가율은 연평균 증가율은 1.0%에 머물으며, 연평균 증가율이 3.6%이었던 제조업과 비교하였을 때 건설 산업의 증가율은 매우 낮은 수준이었다(Barbosa et al., 2017). 낮은 생산성과 더불어, 건설 분야는 IT 투자 비율이 전체 산업 분야인 22개 중 21위로, 타 산업 분야에 비해 디지털화 수준이 매우 낮은 수준에 머물러 있으며(Im, 2021), 그중에서도 한국은 전 세계적으로 디지털화 진행이 특히나 느린 국가 중 하나로 지목되었다(Autodesk, 2020). 대한건설정책연구원과 산업연구원의 조사에 따르면 디지털화와 생산성의 향상은 밀접한 연관이 있으며, 건설 산업의 디지털화를 통해 생산성이 약 25% 상승 될 수 있을 것으로 전망된다(Jeong and Kim, 2022).
최근 머신러닝과 인공지능(AI) 기술은 인간이 해결할 수 없는 복잡한 문제를 빠르게 해결할 수 있다는 장점으로 인해 여러 업계에서 도입되어 생산성 향상에 크게 기여하였다. 건설업계에서도 건강 및 안전 모니터링, 비용 추정, 공급망 및 물류 프로세스 개선, 위험 예측에 머신러닝을 사용하는 등 지난 수십 년간 여러 방면의 연구가 진행되었다.(Kirchbach et al., 2015; Lee et al., 2016, Montaser et al., 2012). 그럼에도 불구하고 건설은 세계적으로도 가장 디지털화되지 않은 산업 중 하나로 남아있으며 인공지능 및 여러 디지털 기술 채택에 어려움을 겪고 있는데, AI 기반 솔루션 배치의 높은 초기비용과 보안 문제, 컴퓨팅 성능 및 인터넷 연결 문제, 그리고 머신러닝에 필요한 데이터 및 데이터 수집 인프라 부족 등이 장벽으로 작용하는 것으로 조사되었다.(Abioye et al., 2021).
특히, 대부분의 건설 프로젝트에서 고속도로, 댐, 교량, 건물과 같은 구조물의 건설 전에 선행되는 토공 작업은 최근 인공지능 기술이 활발하게 도입되는 공정 중 하나이다. 토공 공정은 대량의 흙을 굴삭기를 통해 굴착하여, 덤프트럭을 통해 운반 및 매립하여 지표면을 평평하게 하고 계획한 형태로 변형시키는 작업을 의미하는데, 이 과정에서 건설 예산의 25~30%가 소비된다고 알려져 있다(Hola and Schabowicz, 2010; Lu et al., 2007). 또한, 토공 작업에는 트럭, 롤러, 굴삭기 등의 다양한 중장비가 이용되는데, 이러한 중장비는 디젤 연료를 많이 소비하며, 이에 따라 이산화탄소(CO2)와 같은 온실가스를 다량 배출하여 지구온난화를 가속시킬 수 있다(Lewis and Hajji, 2012). 따라서, 토공 공정에 발생하는 비용을 최소화하여 성공적인 건설 프로젝트를 운영하고, 중장비에서 발생하는 온실가스 배출을 줄이기 위해 토공 공정을 실시간으로 모니터링하고, 공정을 최적화하는 것이 중요하다(Shehadeh et al., 2022).
1.1.2 전통적인 토공 모니터링 및 공정 최적화 방식의 문제점
전통적으로 토공은 관리자가 현장에 직접 방문하여 관찰하는 방식으로 관리되어 왔으며, 이는 많은 시간과 비용이 요구되는 비효율적인 방식이라 할 수 있다. 뿐만 아니라 표준품셈 혹은 과거 데이터 등으로부터 산출된 토공 생산성은 현장의 지형 및 상황을 정확하게 반영하는데 어려움이 있어, 현재 현장에서 진행되는 토공작업의 생산성을 평가하고 최적화하는데 한계가 있다. 이러한 문제를 해결하기 위해 Leica, Trimble 등 다양한 업체에서는 컴퓨터 통신을 이용하는 상용 솔루션을 제공하고 있으며, 공정 계획 및 최적화를 위해 시뮬레이션과 같은 다양한 기법들이 연구되었다. 하지만, 그럼에도 불구하고 현장 적용을 위해서는 다음과 같은 문제들이 남아있다. 첫 번째로 상용 솔루션들의 비용이 높아 건설 업체들에서 해당 솔루션을 이용하는 것에 대한 거부감을 가질 수 있으며, 선행 연구를 통해 그 성능 및 효과에 대한 충분한 검증이 필요하다. 두 번째로, 솔루션의 활용성을 높이기 위해 토공현장 데이터 수집이 필요함에도 불구하고 현장 작업에서 사용할 수 있는 실시간 또는 아카이브 데이터가 부족하며(Nikas et al, 2007), 정확한 데이터를 수집하는데 충분한 노력이 이루어지고 못하고 있다. 뿐만 아니라, 토공 과정은 토양 및 기상 조건, 토공 장비 관련 요인, 교통 상황, 지역 현장 제약 및 기타 인적 요인을 포함하여 광범위한 요인의 영향을 받기 때문에 데이터 수집의 난이도도 매우 높다는 문제가 있다. 세 번째로 시뮬레이션의 경우, 이용을 위해 훈련된 직원과 전문 소프트웨어 시스템이 필요하다는 한계가 있어 실무 도입이 제한적으로 이루어지고 있으며, 결과에 대한 즉각적인 검증이 어려움에 따라 전문가의 판단이 여전히 요구되는 실정이다.(Young et al, 2021).
1.2 연구의 범위 및 방법
본 논문에서는 현장에서 실시간으로 수집되는 토공 장비의 위치(GPS) 데이터를 활용하여 (1) 장비의 시공간적 흐름 및 동적 특성을 시각화하고 (2) 토공 생산성을 추정하며 (3) 장비 투입량을 최적화할 수 있는 시뮬레이션 기반의 토공 모니터링 플랫폼을 제안한다. 개발된 플랫폼은 토공 작업에서 필수적으로 이용되며, 토공 장비 중 가장 많은 온실가스를 배출하는 덤프 트럭에 초점을 맞추었다(Li and Lei, 2010). GPS 로거 모바일 어플리케이션 개발을 통해 실시간으로 모니터링한 덤프트럭의 GPS(Global Positioning System) 데이터를 수집하여 서버에 저장하고, 드론 사진측량으로 생성한 포인트 클라우드 기반의 3D 지형 모델 위에 수집한 덤프트럭의 운반 위치를 표시해 시각화하였다. 현장 포인트 클라우드 상의 적재 위치와 적하 위치를 Geo-fence로 설정하여 덤프트럭의 사이클 타임을 추출하였으며, 표준품셈과 전문가에 의존한 사이클 타임이 아닌, 실제 현장의 덤프트럭의 위치를 추적하여 추출된 사이클 타임을 자체 개발한 Python 기반 이산사건시뮬레이션(DES)에 적용하여 덤프트럭 생산성을 예측하였다. 도출된 결과는 트럭의 대수 별 생산성을 예측함으로써 현장에서 토공 공정을 최적화하는데 기여할 것으로 기대된다.
2. 문헌 고찰
2.1 이산사건시뮬레이션(DES)
토공 공정을 최적화하여 토공 작업에 소요되는 작업시간 및 비용을 최소화하기 위해서는 현장 여건을 정확히 반영한 공정 계획이 필요하다. 경로, 거리 및 이동시간, 자재의 상태 등을 반영하여 운용 장비 대수 조합 별 생산성을 추정하고, 최적의 조합을 선정하기 위해 대기행렬이론(Halpin and Woodhead, 1976)), 선형 계획법(Jayawardane and Harris, 1990), 인공지능 등의 다양한 기술 및 의사결정 지원 기법들이 개발되어 왔다(Moselhi and Alshibani, 2009; Amirkhanian and Baker, 1992). 그 중에서도 많은 비용을 들이지 않고 컴퓨터 내에서 여러 상황을 가정해 가상으로 시험해볼 수 있는 시뮬레이션 기술은 최근 많은 관심을 받고 있다(Abdelmegid et al., 2020). 특히 토공 최적화에는 실제 시스템을 모델링하는 데 사용되는 동적 시뮬레이션 모델 유형인 이산사건시뮬레이션(DES)이 많이 이용되고 있는데, 프로젝트 관리자가 각각의 공정과 인력 및 자재 등을 분해하여 개별의 네트워크로 분류한 뒤 동적 상호 작용을 시뮬레이션하여 건설 시스템의 전반적인 성능을 평가할 수 있게 해주어 토공 공정을 계획하는데 매우 많은 기여를 하고 있다(Akhavian and Behzadan, 2012).
여러 시뮬레이션 기술 중 CYCLONE의 도입은 현대 건설 시뮬레이션 연구에서 매우 큰 의미가 있다. CYCLONE을 기반으로 INSIGHT, MODSIM, STROBOSCOPE 및 ABC 등 많은 시뮬레이션 소프트웨어가 개발되었으며, DES와 관련된 여러 연구들도 진행되었다. 일례로, Liu 와 Loannou(1992)는 시뮬레이션을 위해 객체 지향 설계를 사용하는 COOP과 같은 DES 시스템 도입하였고, Lu(2003)는 건설 공정을 계획하고 개별 건설 자원의 성능을 추적할 수 있는 단순화된 DES 기술인 SDESA를 개발하였다. 또, 기존 DES는 결과 값이 너무 통계적이고 전문가만 이해할 수 있다고 인식되는 한계가 있어, 이를 해결하기 위해 Kamat과 Martinez(2001)는 시뮬레이션의 결과를 시각화하기 위한 연구를 진행하기도 하였다. 하지만, 많은 연구들이 진행되었음에도 불구하고 DES는 실무에 적용하기에는 아직 여러 한계점을 가지고 있다. 예를 들어, DES에는 토공 장비들의 사이클타임이 입력 데이터로서 이용되는데, 시뮬레이션 결과는 이러한 현장 자료에 크게 의존함에 따라 정확하지 않은 입력 데이터가 사용될 경우 시뮬레이션의 결과값이 부정확할 수 있다(Akhavian and Behzadan, 2014). 정확한 값을 시뮬레이션의 입력 데이터로 이용하기 위해서는 현장의 데이터를 지속적으로 수집하여야 하는데, 토공 작업은 현장 여건이 계속해서 변함에 따라 이 과정에 매우 많은 노력과 시간이 소요될 수 있다. 이에, 시뮬레이션의 입력 데이터에 이용될 데이터를 정확하고 편리하게 수집하게 해줄 수 있는 기술의 개발이 요구된다.
2.2 덤프트럭 작업 모니터링
토공 투입 장비의 실시간 모니터링을 바탕으로 현장에서 토공 공정 계획과 실행을 비교하여 공정을 최적화(Alshibani and Moselhi, 2007)하는 과정은 다음과 같다 : (1) 건설 현장의 중장비에서 발생하는 데이터를 수집한 뒤, (2) 수집 된 데이터를 관리, 처리 및 분석하고, (3) 수집 된 데이터를 기반으로 실제 생산성을 추정한다. 이후, (4) 추정 된 실제 생산성을 계획된 생산성과 비교하고, (5) 최적화가 되지 않은 요소가 발견되면 시정 조치를 취한다(Alshibani, 2008). 전통적으로 현장 모니터링은 관리자가 현장에 직접 방문하는 방법이 이용되었다. 하지만 이러한 방식에는 많은 시간이 소요되어 공정 최적화가 지연될 수 있고, 생산성 추정에 관리자의 주관이 반영될 수 있어 공정이 최적화되지 못할 수 있다(Sacks et al., 2003). 이러한 전통적 방식의 문제점을 해결하기 위해 많은 연구자들이 장비의 공정 단계(예, 트럭의 적재, 운반, 적하)를 인식하고 생산성을 모니터링할 수 있는 기술을 개발하였다. 일례로 카메라를 이용하여 머신러닝 기술을 기반으로 토공 장비의 생산성을 모니터링하는 연구들이 수행되었는데, Kim과 Chi(2020)는 여러 대의 카메라를 설치하여 영상을 통해 중장비의 공정 단계를 인식하는 연구를 진행하였으며, Šopić et al.(2021)은 녹화된 영상을 통해 굴삭기의 실제 생산성을 추정하는 연구를 수행하였다. 하지만, 토공 현장의 작업 특성상 흙이 많이 날리는데, 이에 따라 렌즈가 오염되어 카메라의 성능이 저하될 수 있고, 작업 중인 트럭에 다른 장비들이 가려져 정확한 결과를 도출하지 못할 수도 있다. 이를 해결할 방안으로서 가장 유망한 기술 중 하나는 GPS, 무선주파수인식기술(RFID, Radio Frequency IDentification), 가속도센서 기반의 사물인터넷(IoT, Internet of Things)으로, 전자 장치를 대상 장치 및 장치의 구성요소에 부착하여 물리적 움직임과 생산 출력 등을 분석할 수 있다(Kim and chi, 2020).
IoT와 연계되어 이용되는 기술 중 GPS 기술은, 위치 데이터를 편리하게 수집할 수 있는 수단으로서 다양한 위치 인식 기술 개발에 기여하였다. 특히 최근에는, 차량의 위치 데이터가 실시간 교통 관리, 차량 관리 등에 이용되는 등 GPS 장치가 건설 차량 관리에 많이 이용되는 추세이며(Fuet al., 2017), 지리정보시스템(GIS)과 GPS가 통합된 기술이 도시 계획, 현장 안전 모니터링 등에 이용되는 등 많은 연구가 진행되었다(Li et al., 2005). 토공을 위해서도 GPS 기술의 장점을 살린 연구들이 많이 진행되었는데, 일례로 Montaser et al.(2012)는 GPS와 구글 어스를 활용하여 토공 작업의 생산성을 추정하는 연구를 진행하였고, Fu와 Koutsopoulos(2017)는 건설 차량의 GPS 데이터를 이용하여 계속하여 변화하는 적재 및 적하 장소를 추적하는 기술을 개발하였으며, Pradhananga와 Teizer(2013)는 GPS 센서를 이용하여 토공 장비의 위치를 추적하고 기록하여 이를 시각화하기 위한 기술을 개발하였다. 하지만, GPS를 이용한 기존의 연구들은 장비의 위치 데이터를 수집하기 위해 추가적으로 센서를 구매하여 부착하여야 한다는 한계가 있으며, 토공 공정 모니터링을 위한 시각화가 3차원이 아닌 2차원으로 이루어지고 있다는 한계가 있다. 이에, GPS 센서 구매를 위한 추가 비용을 최소화하고, 수집된 GPD 데이터를 3차원으로 시각화함으로써 토공 현장 모니터링에 기여할 수 있는 기술의 개발이 필요하다.
3. GPS 센싱 기반의 실시간 토공 공정 시뮬레이션 및 최적화 기술
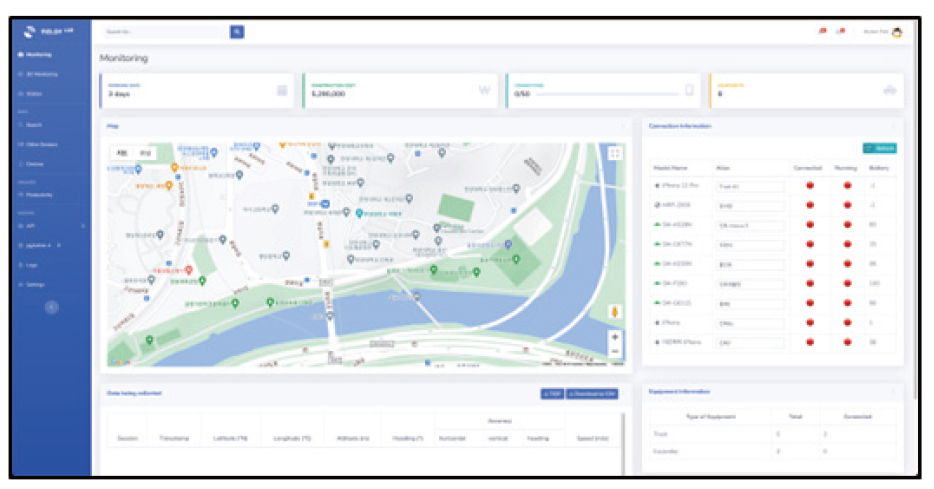
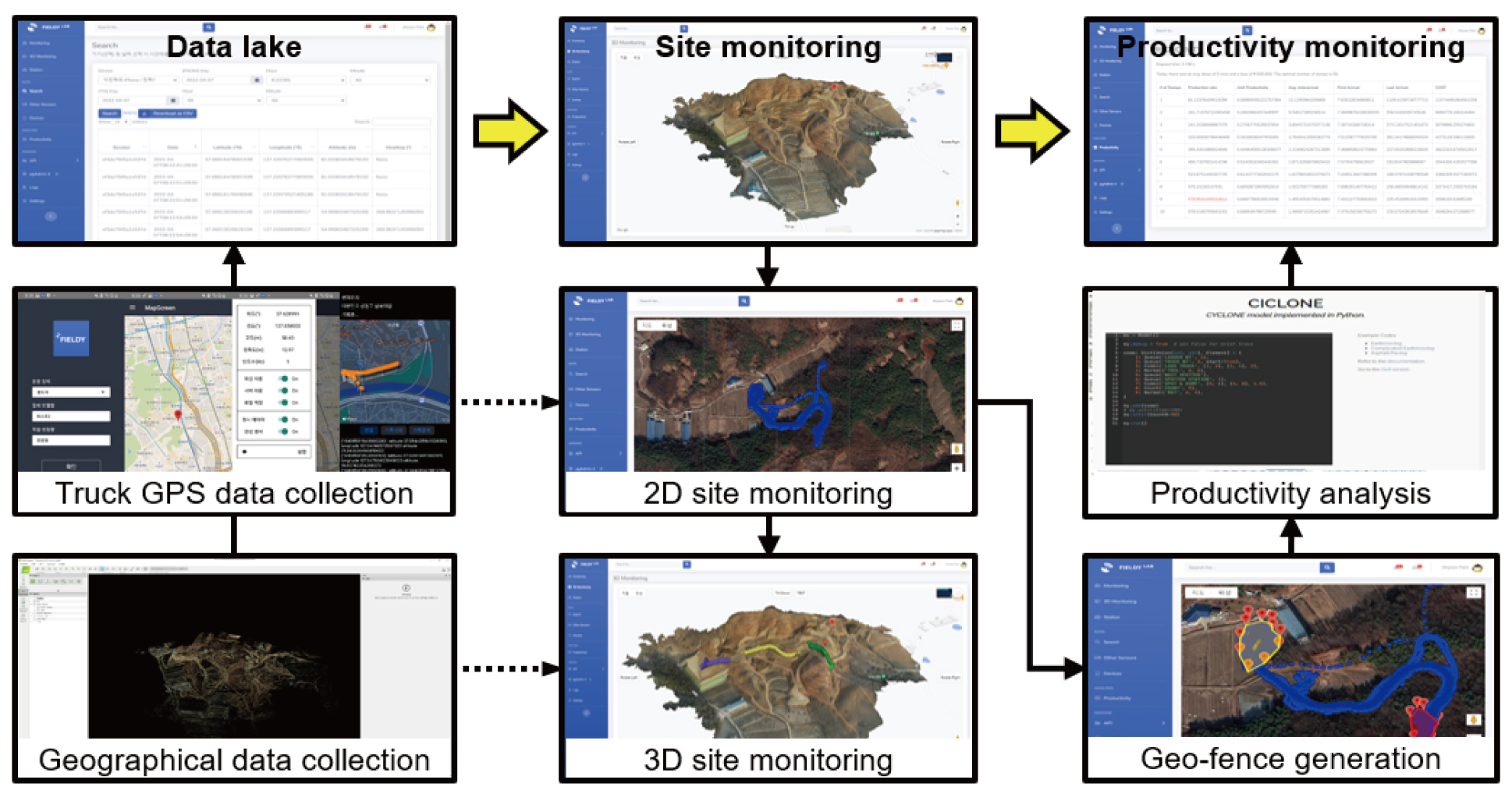
본 연구에서는 사례 연구를 위해 실시간 토공 공정 시뮬레이션 및 최적화 기술을 디지털 플랫폼(Figure 1)에 구현하여 현장에 적용하였다. 개발 기술은 Figure 2와 같은 흐름으로 구현되었는데, 본 디지털 플랫폼을 통해 토공사에 쓰이는 장비의 정보를 디지털 데이터화하여 수집 및 저장할 수 있으며, 저장된 데이터를 분석하여 실시간으로 트럭의 작업을 모니터링하고 생산성을 분석하여 토공 작업을 최적화 할 수 있다.
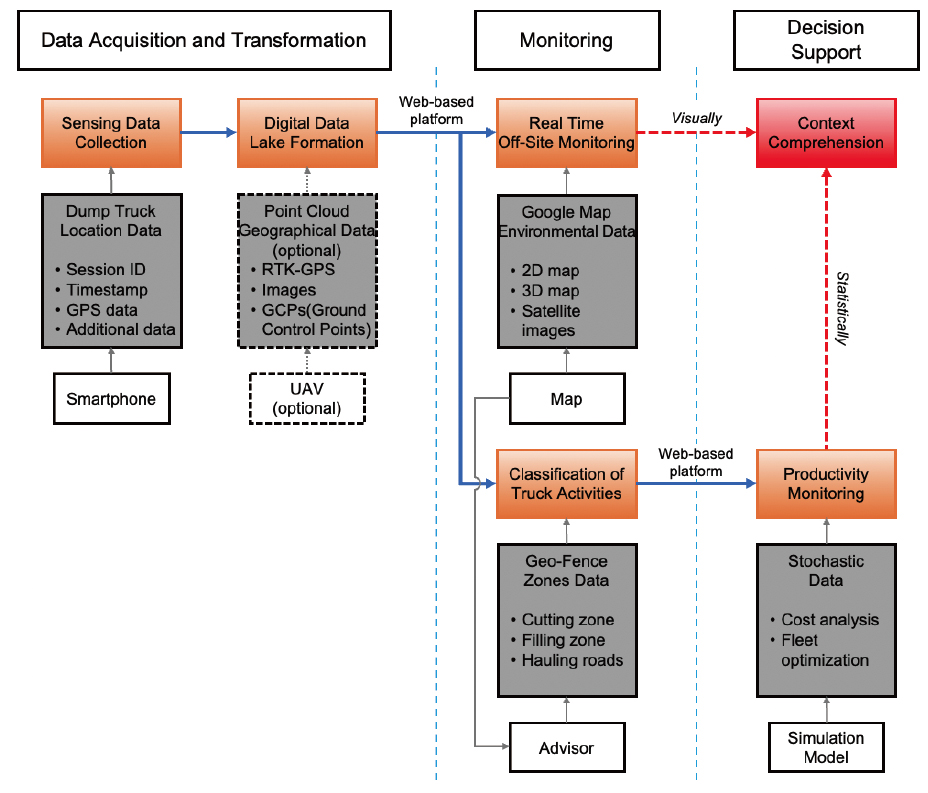
개발된 디지털 플랫폼은 세 가지의 기술로 구성되어 있으며, 그 기술과 기술의 연계도는 Figure 3과 같다. 첫 번째로, 트럭의 GPS 데이터를 수집을 위한 스마트폰 어플리케이션을 개발하고, 수집된 트럭의 GPS 데이터를 플랫폼에 저장할 수 있는 데이터 레이크 시스템을 구축하였다. 개발된 어플리케이션을 통해 트럭의 단위 시간 별 위치 데이터를 취득할 수 있으며 축적되는 GPS 데이터는 트럭의 실시간 위치를 모니터링 하는데 이용된다. 두 번째로, 원격 모니터링을 위해 트럭 위치를 실시간으로 2차원 및 3차원으로 시각화하는 기술을 개발하였으며, 세 번째로 관리자의 의사 결정을 도울 수 있는 트럭 생산성 추정 기술을 개발하였다. 다음 장에서 개발한 세 가지 기술을 자세하게 설명한다.
3.1 GPS 수집 스마트폰 어플리케이션 개발
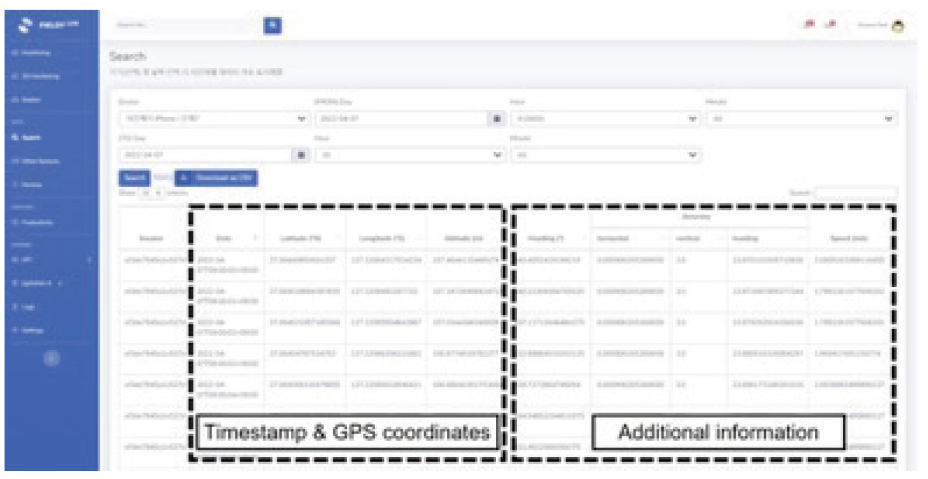
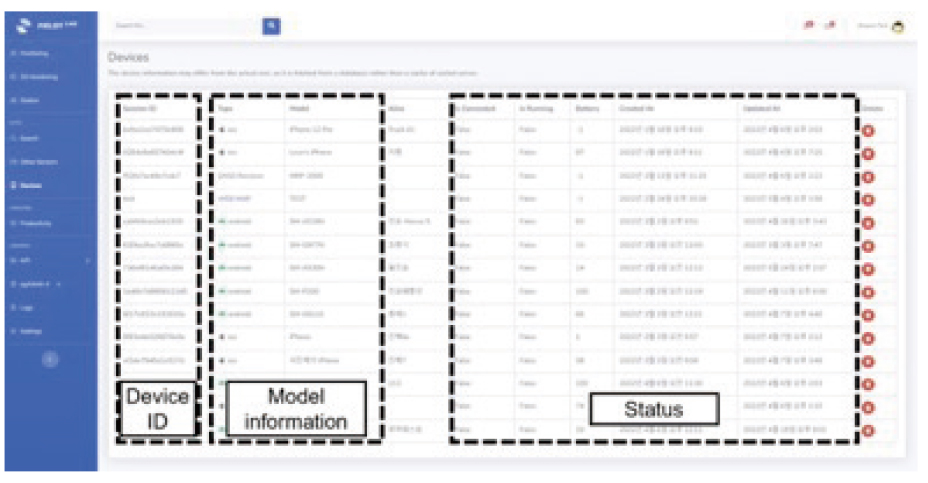
개발된 어플리케이션은 초당 1회의 주기로 트럭의 데이터를 수집하며, 세계 공용 측지계인 WGS84 기준 GPS의 위도, 경도, 고도 정보를 ms 단위의 Timestamp와 연동하여 수집한다. Timestamp는 일자(date)와 국가별 시간으로 변환할 수 있게 설정되었다. 추가적으로, GPS데이터의 이해를 돕기 위해, 트럭의 진행 방향을 나타내는 Heading, 위경도 정확도를 표현하는 Horizontal accuracy와 고도의 정확도를 나타내는 Vertical accuracy, 트럭의 이동 속도인 Speed 데이터도 함께 수집된다. 수집된 데이터는 플랫폼 내에 Figure 4과 같이 저장 및 축적된다.
추가적으로 off-site에서 기기 상태를 파악할 수 있도록 장치(스마트폰)의 연결 여부와 정보 송신 상태, 배터리 상태를 같이 송신하도록 설계하였으며(Figure 5), 데이터 송신이 불가한 상황에 대비하여 장치 내부에 동일한 데이터를 로컬 저장할 수 있는 기능을 추가했다. 데이터는 디지털 플랫폼에 송신되는 데이터와 동일하게 구성되어 있으며, 이를 ‘,’를 구분 문자로 하는 csv 형태로 저장된다. 어플리케이션은 가장 대중적인 스마트폰 운영 체제인 Android와 iOS에 대해 각각 제작되었으며, 지원하는 API 수준을 범용성있게 제작하여 현장 적용에 용이하도록 하였다.
3.2 트럭 위치 시각화 기술
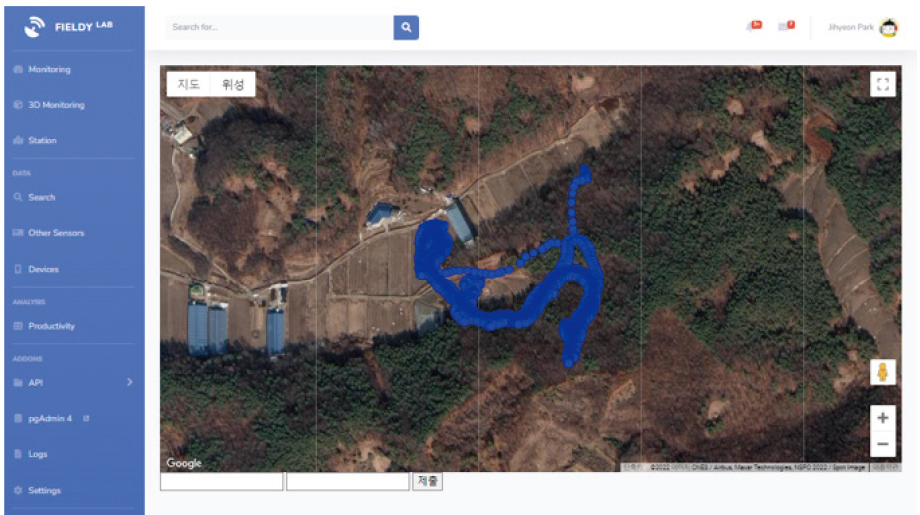
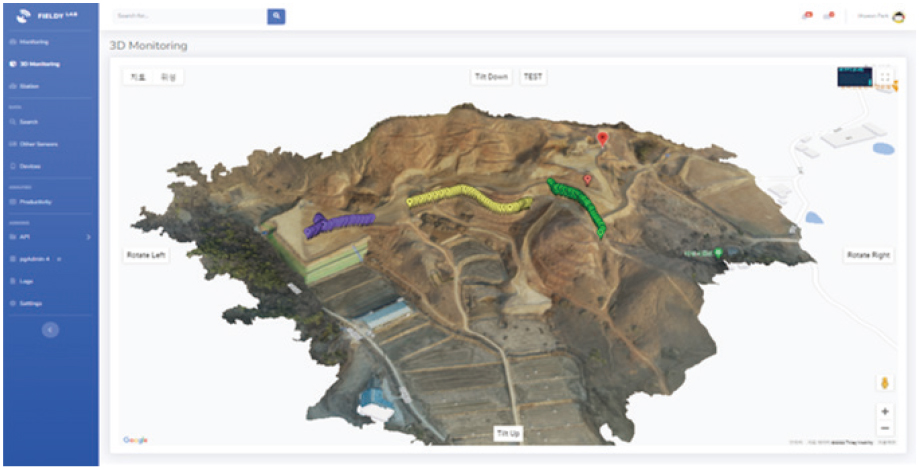
모니터링을 위한 트럭 위치 시각화 기술은 구글 3D 지도를 기본으로 한 현장 지형 정보를 기반으로 구현되며, 경우에 따라서 위성 지도 등도 확인할 수 있도록 하였다. 표출된 지도 정보 위에서 WebGL을 활용하여 실시간으로 찍히는 덤프 트럭의 좌표를 마커의 형태로 표현하였으며, 각각의 트럭에 다른 색상을 부여하여 시각적으로 구분할 수 있도록 하였다. 또한, 위성 지도가 업데이트 되지 않아 현장을 잘 반영하기 어려울 시에는 포인트 클라우드를 기반으로 제작된 현장 3D 모델을 이용하여, 보다 현실적이고 정확한 정보를 플랫폼 이용자에게 제공할 수 있도록 하였다. 사용자의 시점을 상하좌우로 이동하여 원하는 각도에서 3D 모터링이 가능하도록 설계하였으며, 마커를 클릭할 경우 해당 마커의 정보들, 타임스탬프, GPS 정보, 정확도 등을 확인할 수 있도록 제작하여 관리자의 의사 결정을 도울 수 있도록 설계하였다. Figure 6과 Figure 7은 각각 2차원 시각화와 3차원 시각화의 예시이다.
3.3 Geo-fence 기반 트럭 사이클타임 추출 및 DES 기반 생산성 추정 기술
제작된 트럭 GPS 추적 어플리케이션을 통해 수집된 트럭의 위치 데이터를 통해 트럭의 사이클타임을 추출한다. 덤프 트럭의 작업은 적재, 운반, 적하, 복귀로 구성되며, 각각 작업에 대한 사이클타임 추출에는 특정 범위를 사용자가 지정하여 장비의 위치가 어느 범위에 속하는지에 따라 작업을 분류하는 Geo-fence 방식이 이용되었다. 사용자가 절토 구역과 성토 구역을 설정할 수 있도록 소프트웨어를 구현하였으며, 각각의 영역에 트럭이 도달하고 벗어날 때의 타임스탬프를 수집하여 트럭의 적재 및 적하에 소요되는 시간을 추출하였다. 운반과 복귀는 영역을 설정해주지 않고, 적재가 끝나는 시점과 적하가 시작되는 시점의 시간차와 적하가 끝나는 시점과 적재가 시작되는 시점의 시간차를 이용하여 추출되었다.
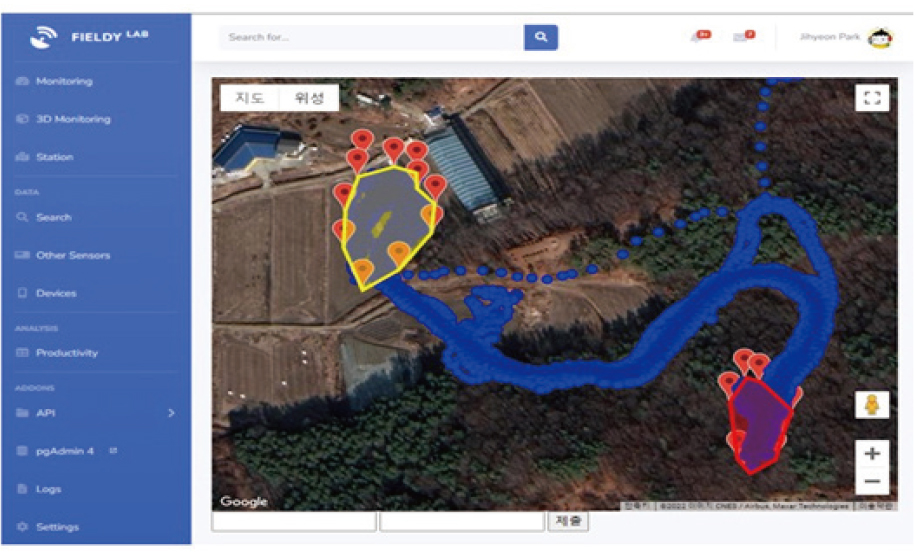
Geo-fence를 설정하기 위해서는 위성 사진 혹은 현장 방문을 통해 수집된 현장 관측 정보가 필수적이다. 하지만, 위성 사진의 경우 업데이트 주기가 길어 유동적으로 변하는 현장의 지형을 실시간으로 반영해줄 수 없고, 현장 방문 방식의 경우 눈으로 관찰한 지형을 GPS와 정확하게 연동할 수 없다는 단점이 있다. 이러한 문제를 해결할 방안으로서 본 연구에서는 현장 지형의 포인트 클라우드를 이용하였다. 현장 포인트 클라우드를 구글 지도와 함께 디지털 플랫폼 상에서 WebGL 형태로 구현하여 적재 및 적하 위치의 좌표를 설정해 Geo-fence를 설정할 수 있도록 구현하였다(Figure 8).
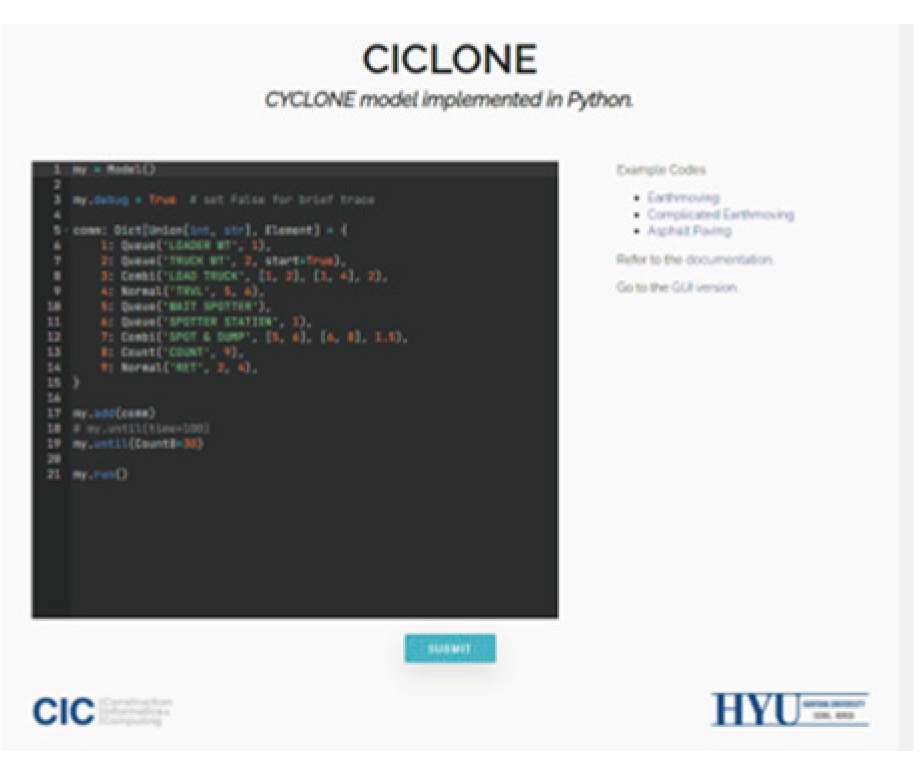
이후, 추출된 트럭의 세부 공정 별 사이클타임은 Python 프로그래밍 기반으로 자체 개발된 DES(Figure 9)에 입력되어 생산성 추정에 이용된다. 개발된 DES 기능은 플랫폼 내에 내장되어 있으며, 장비의 대수를 사용자가 설정하여 장비 조합 별 생산성을 추정할 수 있다.
4. 사례 연구 및 결과
개발한 기술의 구현을 검증하기 위해 2022년 3월 경기도 안성시의 산업단지 조성 현장을 대상으로 사례 연구를 진행하였다(Figure 10). 절토부부터 성토부까지 직선 거리는 약 300m로, 작업에는 굴삭기 1대, 덤프 트럭 3대와 도저 1대가 이용되었다. 트럭은 적재 용량이 14m3인 25.5톤 트럭이 이용되었으며, 트럭 위치 데이터 수집을 위해 자체 개발 어플리케이션이 이용되었다. 오전 7시 30분부터 오후 5시까지 점심시간을 포함하여 약 9시간 30분 동안 데이터를 수집하였으며, 1Hz의 데이터 수집 주기로 약 24,000개의 위치 정보 데이터를 수집하였다.

4.1 현장 3D 지형 모델 구현 및 트럭 위치 시각화
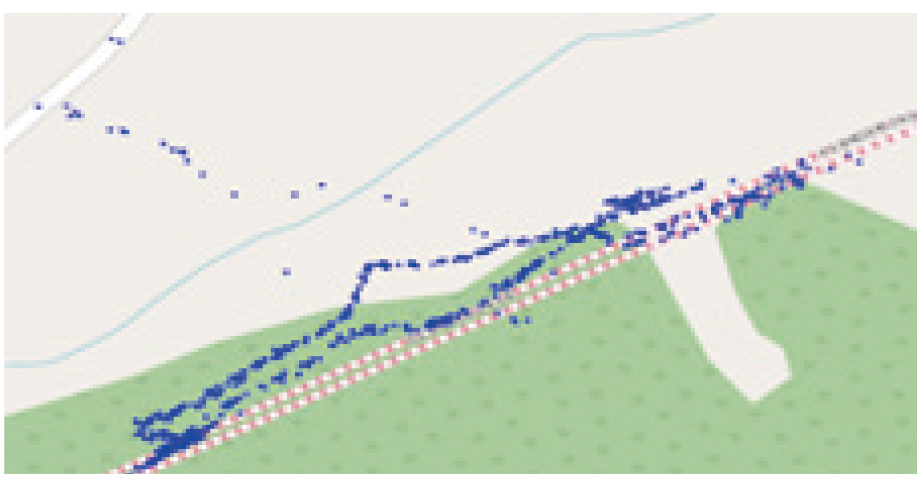
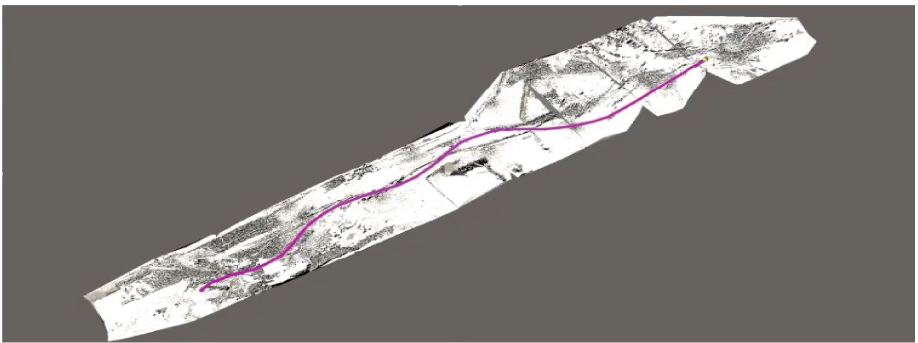
트럭의 위치는 Figure 11과 Figure 12와 같이 2D 와 3D로 각각 시각화되었다. 2D 시각화는 구글 지도와 트럭의 GPS를 연동하여 구현되었으며, 3D 시각화는 고정밀 드론(DJI의 Phantom4 RTK 모델) 촬영을 통해 수집된 포인트 클라우드 데이터를 이용하여 구현하였다. GPS 데이터와 3D 지형 모델을 연동하기 위해 드론 측량 시 5군데의 현장에 GCP를 함께 설치하였으며, GCP 좌표는 RTK-GPS 측량기를 통해 측량하였다. 촬영된 이미지들은 Pix4D 소프트웨어를 통해 정합 되었으며, 제작된 3D 지형 모델은 이후 트럭 위치 시각화 기술 및 생산성 추정 기술에도 이용되었다.
4.2 GPS 데이터 기반 트럭의 사이클타임 예측 및 DES 기반 생산성 예측
트럭의 GPS 데이터를 수집하기 위해 트럭에 개발된 어플리케이션이 설치된 스마트폰을 설치하였다. GPS 센서를 트럭 내부 깊숙한 곳에 스마트폰을 부착한다면 위치 데이터의 소실 및 왜곡이 발생할 수 있다. 이에, 각 스마트폰들은 거치대를 사용하여 조수석의 대시 보드 위 창문에 모두 동일한 형태로 거치하여(Figure 13) 데이터 편향 발생 가능성을 최소화하였다.

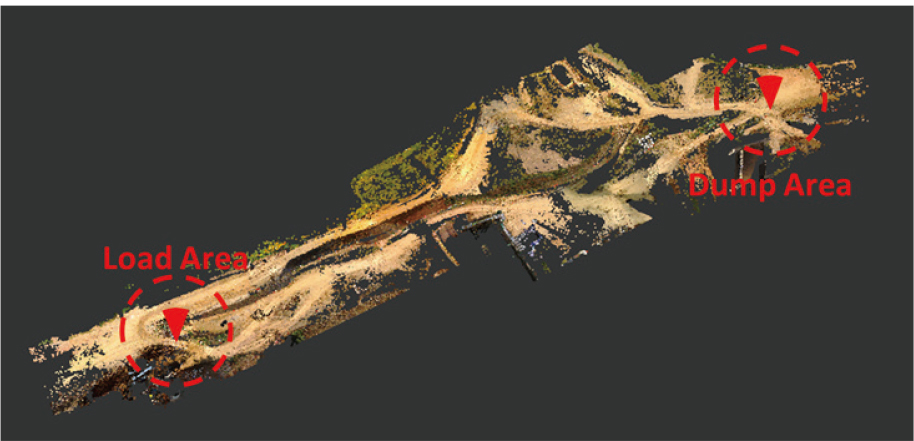
수집된 GPS 데이터로부터 사이클타임을 추출하기 위해 현장 지형의 포인트 클라우드를 기반으로 제작된 3D 지형 모델에 Figure 14와 같이 다각형 형식의 Geo-fence를 생성하였다. 절토부와 성토부 영역의 경계를 현장에서 관찰한 뒤 플랫폼 내의 3D 모델에 해당 경계를 클릭하여 영역을 설정하였다. 이후, 4개의 세부 작업으로 라벨링 된 GPS 센싱 데이터를 통해 각 공정별(적재, 운반, 적하, 복귀) 소요 시간을 추출하였다.
본 현장에서 수집된 데이터는 총 103개의 사이클로, 각각의 공정별 소요 시간은 적재, 운반, 적하, 복귀 순서로 각각 평균 3.858분, 5.792분, 0.855분, 4.017분이었으며, 결과 값은 Table 1과 같다.
Table 1.
Truck cycle times collected from GPS data
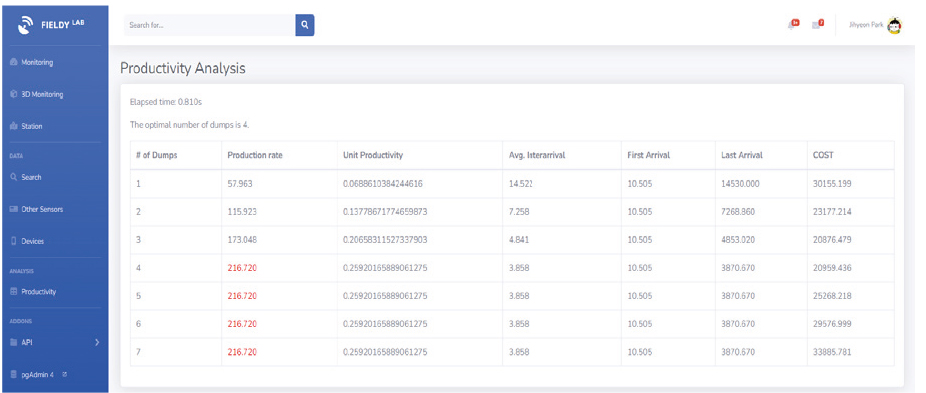
이후, 본 소요시간 데이터를 플랫폼 내의 DES에 입력하여 트럭의 대수 별 생산성 및 단위 비용을 계산하였다. 현장에서 실제로 사용하는 장비의 일위 대가를 기준으로 굴삭기는 $461.85/일, 덤프 트럭은 $534.33/일를 운용비로 가정하였으며, 총 공사 기간와 단위 시간당 장비 운용비를 곱하여 총 비용을 계산하고, 이를 총 생산량으로 나누어 단위 부피 별 작업 비용을 산출하였다(Table 2). 시뮬레이션 결과값은 Figure 15와 같이 플랫폼 내에서 확인할 수 있다.
Table 2.
The result of the simulation optimizing productivity
분석 결과에 따르면, 트럭의 수가 4대까지 증가할 때 그와 비례하게 생산성이 증가하고, 4대 이후부터는 생산성이 증가하지 않는다. 이와 반대로, 트럭의 수가 3대까지 증가할 때, 단위 비용은 감소한다(Figure 15). 트럭이 4대가 이용될 때, 3대가 이용될 때보다 단위 비용은 소폭 증가하였지만, 그 양이 크지 않기에 본 연구에서는 실제 이용된 트럭 대수인 3대가 아닌, 4대의 트럭을 이용하는 것이 본 현장에 적합하다고 판단하였다.
5. 결론
본 연구에는 덤프트럭 모니터링과 토공 작업 생산성 분석을 위한 스마트폰 내장 GPS 센서 기반의 토공 공정 관리 기술을 제안한다. 제안된 기술을 통해 추가적인 센서 구매 없이 보다 적은 비용으로 토공 중장비의 위치 데이터를 실시간으로 취득할 수 있으며, 이를 디지털 플랫폼에 축적하여 데이터 레이크를 구축할 수 있다. 또, 드론 측량을 통해 제작된 현장 지형 3D 모델을 기반으로 Geo-fence를 설정하여 장비의 사이클타임을 추출하고, 이를 플랫폼에 내장된 DES 기술에 입력하여 최적화된 토공 공정 계획을 수립할 수 있으며, 트럭의 위치를 플랫폼 내에 시각화 하여 관리자의 의사결정을 도울 수 있다.
하지만 제안된 기술에는 다음과 같은 한계점이 존재하였다. 첫 번째로, 타 장비 및 보행자의 간섭으로 인한 정차 등 비정상적인 장비의 움직임에 의해 이상치 데이터가 수집되는 경우 사이클타임이 부정확하게 추출될 수 있으며, 이로 인해 생산성이 잘못 예측될 수 있다. 또, GPS 센서에서 자체적으로 발생하는 오차 및 이상치를 자동으로 분류해내는 기능이 없어, 사용자가 이를 직접 제거해주어야 한다는 한계가 있다. 따라서, 수집된 데이터의 이상치 여부를 판단하고 이를 자동으로 제거 또는 보정하는 기술의 개발이 필요하다. 두 번째로, 트럭의 위치 데이터로부터 사이클타임을 추출하기 위해, 플랫폼 사용자가 공사 정보 수집 및 현장 관측 등의 방법을 통해 직접 Geo-fence를 설정해주어야 한다는 한계가 있었다. 이에, 축적된 트럭의 GPS 데이터를 머신러닝 기법 중 한 가지인 클러스터링을 이용하여 Geo-fence를 설정하는 기술 등, Geo-fence를 자동으로 설정할 수 있는 기술의 개발이 필요하다.
향후 본 연구는, 개발한 플랫폼 내에 구축된 데이터 레이크를 이용하여 실시간으로 수집되는 데이터의 이상치 여부를 자동으로 판단할 수 있는 기술과 Geo-fence를 자동으로 설정하는 기술로 확장될 수 있다. 더 나아가 시각화 기술은 계획 지형과 현재 지형의 비교를 통한 잔여 작업량 분석 기술로 확장될 수 있으며, 위치 데이터와 해당 데이터의 타임스탬프를 연동을 통한 토공 공정 4D 시각화 기술로 확장될 수 있을 것이다.
